今日のアニソン、「邪神ちゃんドロップキック」から『あの娘にドロップキック』 [今日のアニソン]
ラグランジュ方程式 [ddt³さんの部屋]
4.ラグランジュ方程式
標準的な解析力学のテキストでは、じつは(9)を導いた段階でダランベールの原理は退場してしまうのです。というのは(9)はままでは、この関係に使い途がないからです。
成立過程に忠実に物事教えるという解析力学講義の導入は、間違いではないのですけれど、3世紀も古い物質観のもとに「幾何学的拘束条件による抗力は、それ自身で釣り合う」という事実を語るのみで、ダランベールの原理はお役御免になります。
この事態を学生はどう受け取るかというと、今までの話は何だったんだ?と混乱します。だってラグランジュ方程式の導出の本質には、ダランベールの原理は全く無関係ないんですよ。あるいは、それ以上はありもしないダランベールの原理の物理的意味を求めて、とある学生は「標なき旅(永井龍雲)」に出ます(^^;)。一般相対性理論の等価原理なんかに逢着出来たら幸いですが、そのような人は最初からそれ以上の物理的意味はないと見抜くはずです。
(9)のもともとの目的は、「その未知の束縛の力を用いずに既知の力だけで運動方程式を書く事」にあります。
![]()
運動方程式は、Fj-mjaj=0でしょうか?。山本先生に脚注で怒られますよ(^^;)。同pp.317にはこうあります。
「ラグランジュ自身、「もっと複雑な原理やもってまわった原理から導かれる方法に比べて、ダランベールの原理の方法は、たいがいの場合、ずっと込み入っている」と認めている。」
要は、もう一工夫必要という事です。(9)からFj-mjaj=0としてはいけないのは、(9)が仮想変位δrjに関する恒等式ではないからです。だったら恒等式にすれば良い!が、ラグランジュの基本的着想です。
話を単純化するために、図-1の質量m2はないとします。m1とm2をつなぐ伸びない糸も当然無しです。m1を単にmで表します。δr=(δx,δy)と書けます。(x,y)は質量mの(m1の)座標。ここまで単純化したので、(9)の内積を成分で書き下します。次式で、下付き添え字x,yはFとaのx方向,y方向成分を表します。
![]()
もし(10)で微小変位δx,δyを互いに関係なく任意にとれたら恒等式なので、δx,δyの前の係数部分はそれぞれ0になる必要があり、x方向とy方向の運動方程式が、Fx=max,Fy=mayとそれぞれ得られます。しかしmは拘束軌道Cに束縛されているのでした。Cが円だとすると(x,y)は円の方程式を満たさなければならないのでδx,δyは完全に任意ではなくなり、(10)は恒等式ではありません。
最もベタにやるとすれば円の方程式を利用してyをy=y(x)の形に表し、(10)をδxだけで書き直してやってδxに関する恒等式とする事です。でも、もっとスマートな方法があります。
図-1でm2がないとすれば、m(m1)の位置は、円形軌道Cの中心からmまで引いた動径rの、x軸からの角度θだけで決まるじゃないですか。もちろんx-y座標系の原点は、円Cの中心にあります。つまり極座標に移れば良い、という事です。見た瞬間にわかりますよね?(^^)。rを一定として、
![]()
です。ここから、
![]()
なので、(11)を(10)に代入し、
![]()
です。δθは任意なので、(12)は恒等式で、
![]()
が「θに関する運動方程式」です。
ここで言えるのは、系の自由度を適切に反映した座標系に移れば(それはけっこう見た瞬間にわかる)、系への拘束は座標変換の定義に含まれてしまい全然考える必要がない(^^)、という事です。しかも拘束力を考慮する必要すらない(^^)。ただし(13)においては力と加速度はもとの(x,y)系での表現になっているので、力と加速度をθ座標で表さなければ、(13)をそのまま「θに関する運動方程式」として解く事はできません。
だったらθ座標で力と加速度を書き直せば良いと、ラグランジュは考えました。上記状況を一般化するとこうなります。
N個の質点(質量)があるとすれば、取り扱わなければならない座標値は3N個になります(3次元で考える)。そこにs個の幾何学的拘束条件が入ったとします。s個の幾何学的拘束条件により、3N個の座標値は互いに関係付けられ、3N個の未知数のうち任意の(3N-s)個を決めれば、s個の幾何学的拘束条件に従属して残りs個の未知数も決まるという状態になるはずです。連立方程式の未知数と条件数の関係ですよ。
3N-s=n個の独立な自由度は原理的にはどうとでも選べます(未知数と条件数の関係だから)。それらをqj,j=1~nで表し、一般化座標と呼びます。一方もともとの(x,y,z)座標で表されていた3N個の座標値は、x,y,z方向に関わらず、xk,k=1~3Nで表す事にします。s個の幾何学的拘束条件から、
![]()
となります。(14)は(qj)から(xk)への座標変換を定義し、その中に系への拘束は全て自明に含まれます。だってそうなるような座標系を選ぶんですから(^^)。
座標変換に時間tが含まれて良いのは、仮想仕事の原理が、時間に依存する幾何学的拘束にも対応してるからです。意外かも知れませんが、ラグランジュの方法はとんでもなく広い座標変換を考慮しているんです。
(xk)表現による仮想働の原理は、
![]()
ですから、後は(14)を利用してひたすら計算に励むだけです。この「ひたすら計算に励むだけの作業」をラグランジュは非常に重視しました。
何故なら系の動き方を適切に反映する座標への座標変換は、図-1を見た時のようにたいがいは一瞬で明らかになる。座標変換式(14)は、それに基づき一定の訓練さえあれば誰でもが書ける。そして(14)と(15)さえあれば、後は「ひたすら計算に励むだけの作業」になる。計算というのは、一定の訓練さえあれば誰でもが出来るようになるものだ。従って一回だけ図-1を見れば、ニュートンの方法のようにその後も幾何学的関係を常に気にする必要は全くなくなる。私は力学において、究極のバカチョン方式を作ったのだ。
個人的意見ですが、究極のバカチョン方式は数学・物理学を問わず、それらの究極の目的の一つのだと思います。そして時代は(18世紀は)そのようなものを求めていました。という訳で励みます。
座標変換(14)による(15)の書き換えを行います。(14)より、
![]()
なので、
![]()
(17)でxkの時間tに関する偏微分項がないのは、仮想変位は時間を止めて行うからです。時間に関する微分を'とすれば、ak=(xk')'は明らかなので、(17)の(15)への代入結果は、
![]()
です。
ここで(18)の目的を思い出します。座標(xk)から(qj)に移り(15)を(qj)で書き直して(18)を得た目的は、それを仮想変位δqjに関する恒等式として、qjについての運動方程式を導く事でした。完全に独立な座標qjだけで(15)を書き直すためにこそ、座標変換(14)を導入したのでした。よって(18)をδqjの添え字jについて整理します。添え字k,jに関する和に特に制限はないので、
![]()
とできます。(19)の仮想変位δqjは完全に任意です。従って、
![]()
が一般化座標qjに関する運動方程式です。しかし(20)はまだ(13)の状態です。そこで(20)が(xk)を陽に含まないように、形式的に書き換えます。(16)から明らかに、
![]()
です。そして次の形式的記法を導入します。
(22),(23)の言ってる事はこうです。(21)最右辺で、xkは(qj)とtの関数ですが、そこに(qj')が新しく加わります。(qj)と(qj')は本当は時間tを介して関連しているのですが、「(qj)と(qj')があたかも無関係な変数であるかのように、xk'=xk'((qj),(qj'),t)であるとみなせ!」と言ってるんです(^^;)。
この形式的記法は、次の変形のためにあります。(20)の左辺2項目に積の微分公式を適用すると、
ですが、(24)の右辺2項目の後半は、正しい(?)微分のやり方で、
![]()
となり、形式記法で書いた(23)に一致します。
よって(24)は形式記法の定義を忘れないという前提で(22)も(25)とともに使い、
![]()
と書ける事になります。
さらにxk'=xk'((qj),(qj'),t)の前提のもとに、右辺には形式的に合成関数の微分公式も適用できます。
![]()
(27)を(20)に代入すれば、
ですが、Σk1/2×mkxk'2というのは、系の運動エネルギーVです。
![]()
次に(28)左辺1項目にもう少し詳しい情報を与えます。恐らく次の考えは、いま導こうとしているラグランジュ方程式から一般に広まったと思えるのですが、Fkが座標(xk)のみで決まる力であるとき、保存力と言います。代表格は万有引力の法則です。Fkが保存力の場合、それは力のポテンシャルU(x1,x2,・・・,x3N)から導けます。Uはスカラーです。
なので(28)左辺1項目は、力のポテンシャルUを新しい座標qjで偏微分した形になります。(29)の中辺は、一般化力と呼ばれます。(29)を(28)に使い、全体の符号を変えると、
![]()
を得ます。(30)を正しく使うためには、あらかじめ運動エネルギーVを(21)を使ってV=V((qj),(qj'),t)の形に書き換えておき、Uも同様に(14)を使ってU=U(qj)の形に書き換え、qj'に関する微分は「(qj)と(qj')はあたかも無関係な変数であるかのように、形式的に微分する」必要があります。
ところでU(qj)は(qj')を含まないので、そのqj'に関する微分は0です。そこで、
![]()
なるLを定義しておくと(30)は、
![]()
と書ける事になります。(32)をラグランジュ方程式と言い、L=V-Uはラグラジアンと呼ばれます。
保存力の場合ラグランジュ方程式はとても綺麗になります。それで次の物質観が広まったと思えます。
「物体は微粒子から構成され、微粒子間には保存力が働く。個々の微粒子はニュートンの運動方程式に従う」
自分はこれを、古典力学の特殊事情と呼んでます。
つまり純粋な古典力学とは、保存力とニュートンの運動方程式しかない世界です。
5.ラグランジュ方程式はわかりにくいのだ
あらためてラグランジュ方程式をちゃんと導いてみましたが、とってもわかりにくいなぁ~と思いました(^^;)。
前項の始まりは、N個の質点の運動の記述には3N個の座標値が必要な事、s個の幾何学的拘束条件があると自由に選べる座標はn=3N-s個に減る事などでしたが、こいつらはラグランジュ方程式の具体的な導出過程において、何か本質的な役割を果たしたでしょうか?。自分の意見では、全く無関係です!
もし果たしたとすれば、3N個の(xk)からn個の(qj)に移る座標変換で便利になるはずだぁ~という、ラグランジュ方程式への動機付けくらいです。
なので具体的にラグランジュ方程式を導びく段階になると、座標変さえありゃ~良い事になり、本質的には何の寄与もしていません。だって形式的な微分規則を導入して、(xk)が陽に現れない形に強引に運動エネルギーとポテンシャルエネルギーを持ち込んだんですよ。たったら座標変換から出発すりゃ~良いじゃない!、と学生は思う訳です。
もう大方の予想はついてると思いますが、ダランベールの原理も仮想仕事の原理も使わずに、座標変換のみに基づいて運動方程式を書き換え、ラグランジュ方程式を導く事は可能です。
ランダウ先生の力学はこの方向の根拠に変分原理を据え、無茶苦茶スマートにラグランジュ方程式が出てきます。そこではダランベールの原理も仮想仕事の原理も、一顧だにされません(^^;)。
赤っ恥をかくネムネコ [ひとこと言わねば]
ブラゲロの質問(7月24日)への回答のオマケ
 問題
問題
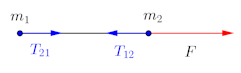
右図のように、(ピンとはられた)糸でつながれた質量m₁、m₂の物体を水平方向に力Fで引っ張るとする。この時の質量m₁、m₂の加速度aを求めよ。
ただし、F以外の(外)力は働いておらず、m₁とm₂を結ぶ糸の長さは変わらないものとする。
【解(?)】
m₁がm₂に及ぼす力をT₁₂、m₂がm₁に及ぼす力をT₂₁とすると、運動方程式は
![]()
作用・反作用の法則により
![]()
よって、①+②は

(解答終)
高校の物理ならば、上のように解くんでしょう。
すこし進んで大学1年レベルの物理では次のように解くと思うにゃ。
【別解(?)】
質量m₁、質量m₂の(重心の)位置を、それぞれ、x₁、x₂とすると、運動方程式は

問題の条件より糸は伸び縮みしないので、

よって、
![]()
また、作用・反作用の法則より、
![]()
よって、①と②の両辺を加えると、

(解答終)
ブラゲロの質問への回答には、
なのですが、ddt³さんが今回、紹介してくださった、解析力学的な考え方では、すこし事情が異なってきます。。
この条件は、質量m₁と質量m₂の2つの物体を結ぶ糸が伸びたりたるまない、つまり、質量m₁の物体と質量m₂の物体の距離Lが変わらない、不変であるという幾何学的な条件(拘束条件の1つ)を加えることによって導かれるものなんですよ。
と書いたけれど、作用・反作用の法則を使わないと、簡単に解けないかもしれない。
どうやら、ネムネコの勘違いだったようだにゃ(^^ゞ
オレは、物理屋さんじゃねぇから、間違うこともあるわな(^^ゞ
オレはネコなのでヒトじゃないけれど、たまに、思い切り間違えたほうが、茶目っ気と人間味があっていいと思うにゃ。
ブラゲロからの質問の回答(7月24日) [ひとこと言わねば]
ブラゲロから次の質問をもらったにゃ。
図-1で T1 + T2 = 0 と考えてよいのですか?

この質問のもとになった記事を書いたddt³さんの代わりに、ネムネコが答えることにするにゃ。
ニュートンの運動の法則の第3法則、作用・反作用の法則は、
「作用に対し反作用は常に逆向きで相等しい。あるいは、2物体の相互作用は常に等しく逆向きである」
です。
図1の場合、
張力T₁は質量m₂の物体が質量m₁に及ぼす力(相互作用)
張力T₂は質量m₁の物体が質量m₂に及ぶす力(相互作用)
ですから、作用・反作用の法則から
T₂=−T₁ (向きが逆なので、右辺のT₁にマイナスをつけないといけない)
∴ T₁+T₂ = 0
となります。
なのですが、ddt³さんが今回、紹介してくださった、解析力学的な考え方では、すこし事情が異なってきます。。
この条件は、質量m₁と質量m₂の2つの物体を結ぶ糸が伸びたりたるまない、つまり、質量m₁の物体と質量m₂の物体の距離Lが変わらない、不変であるという幾何学的な条件(拘束条件の1つ)を加えることによって導かれるものなんですよ。
それが、(6)式の
![]()
という条件です。
これは本来、位置ベクトルを使って、
![]()
と書くべきなんでしょうけれど、記号的に冗漫になるので、このあたりはご愛嬌ということで。
なお、![]() はそれぞれ質量m₁の質点と質量m₂の質点の位置ベクトルです。
はそれぞれ質量m₁の質点と質量m₂の質点の位置ベクトルです。
間違っていたらどうしよう・・・。
いつものように、「私は物理屋ではないから」という言葉で誤魔化すことにしょう(^^)
ここからは、余談。余計なおしゃべりだにゃ。
位置ベクトルですから、ベクトルの起点、原点Oなる点が必要になります。
「じゃぁ、その原点はどこか」という哲学的な問題がここで出てきます(^^)
原点は、アリストテレスのいうところの不動の動者である神さまでしょう。そして、この神さまの御座を原点にとった座標こそ、絶対的な座標系になるに違いない(^^ゞ
しかし、
![]()
とおくと、
![]()
となるので、質点2に対する質点1の相対的な位置、変位しか現れない。
それだけでなく、ネムネコを宇宙の中心O'にとっても、⑨の右辺は
![]()
となります。
ですから、首尾一貫していれば、どこを原点にとって座標系を設定してもいいということになります。
さらに、速度、加速度も、位置の変化しか意味を持たないので、どこを原点に採用し座標系を設定してもいいことになるんですよ(註)。
ということで、一番、計算が楽になるように座標系を設定すればいいってことになる。
このあたりの話に興味がお持ちならば、たとえば、ウィキペディアの「絶対時間と絶対空間」などの記事を読まれるとよろしいのでは。
(註)
時間Δtで、点P₁が点P₂に移動したとすると、速度(ベクトル)![]() は
は
![]()
となるので、どこを原点に選んでも速度ベクトルは変わらない。
このことは、どこを原点にとって座標系を設定してもよいことをあらわすのと同時に、(力学的な)空間には特別な座標系が存在しないことを意味する。
今日のアニソン、劇場版「進撃の巨人」から『紅蓮の座標』 [今日のアニソン]
ラグランジュの解析力学] [ddt³さんの部屋]
ddt^3です。ネコ先生に促されて渋々(?)書きます。面倒くさいなぁ~も~(^^)。
以下では「重力と力学的世界(古典としての古典力学),山本義隆,1981年,現代数学社」を、山本ボン(本)と称します。
1.パラダイムチェンジは起こったか?。
ネコ先生はこう仰っています。
「右辺の項を左辺に移行しただけに見える(ダランベールの原理)、ニュートンの運動方程式のこの書き換えが、コロンブスの卵、つまり、大きなパラダイムチェンジであり、この書き換えがその後の力学理論にどのような影響を与え、力学理論の発展に寄与した・・・」
いいえネコ先生が意図していると思われる、一般相対性理論につながるようなパラダイムチェンジは全く起こらなかったのです。むしろ逆のパラダイムシフトが起こりました。オイラー,ダランベール,ラグランジュは18世紀のフランス啓蒙主義時代を生きた人達です。
そこではそれ以前に盛んに議論されていた、力(重力は)はなぜ伝達されるのか?とか、なぜ物体は運動するのか?などの問いを積極的に却下し、自然哲学は「何故ではなく、どのように力などが伝達され、物体は運動するかを問うべきだ」という、約1世紀前にガリレイが公表した考えを公に認める時代に入ります。
この思想は19世紀にマッハによって近代的に整備され再登場します。要するに重力などの力の発生原因は問わない!という事です。力はどのように物体に作用しどのように物体は運動するのかさえわかれば良いと。
そしてそのようなパラダイムシフトは可能であり、ダランベールの原理を再定式化して、それを可能にするような技術的ブレークスルーを与えたのがラグランジュの解析力学です。
2.当時の状況
当時問題になっていたのは、次のような状況です。山本ボンのpp.310にあります。ダランベールの言です。
「ある仕方で互いに配置された物体の系が与えられたとせよ。これらの物体のそれぞれにある一定の運動を刻み込むとせよ。それぞれの物体はその〔相互〕作用のためにその刻み込まれた運動にひきつづいて従うことはできないであろう。〔その場合に〕各物体がとらなければならない運動を見出すこと(が力学の問題である)。」
※ ()と〔〕内は、原著者と自分の追記(^^;)。
なんか良くわからなかったと思いますけれど、これはじつは、今では機械工学に出てきそうな状況です。例えば図-1です。
図-1の重力mgが「刻み込まれた運動」の原因です。つまり刻み込まれた運動とは自由落下です。質量m1とm2は、m1gとm2gの下向きの重力を受けます(図がうるさくなるので省略)。
ところが質量m1,m2は、円形の束縛軌道Cに拘束されています。m1とm2は円形のC上でしか動けないのです。当然Cはm1,m2を自由落下させないために(円形軌道にとどまらせるために)、抗力(Hj,Gj)を発生させます。抗力(Hj,Gj)によって、m1,m2の自由落下運動を進路妨害する訳です。これが「相互作用のためにその刻み込まれた運動にひきつづいて従う事が出来ない」の意味です。
しかもm1とm2は、伸びない糸で結ばれています。m1とm2の相対距離を不変に保つために、糸の張力Tjも変化しますから、これも「相互作用のためにその刻み込まれた運動にひきつづいて従う事が出来ない」もう一つの理由です。
図-1に示したx-y座標系においてこれら全ての力、重力m1g,m2g、拘束軌道Cの抗力(H1,G1),(H2,G2),糸の張力T1,T2を全部考慮して単純に運動方程式を書いたら、とんでもない目に合います(^^;)。
合いますが、これは問題なんでしょうか?。だってニュートンはこういう付加条件のいっさいない惑星の運行を17世紀に見事に解いてイギリスの国会議員になり造幣局長にまでなりました。こんなもんは考えなくても良いんじゃないの?。
駄目だったんです。なぜなら時代は19世紀の産業革命前夜だったから。図-1のようなものまで便利に解ける技術が求められていたんだと思います。図-1は恐らく、17世紀には解析不能とみなされてたと思います。だいたいプリンピキア発表当初にそれを理解できた人達は、世界で数人しかいなかったそうです。ここで世界とは、当時のイギリスとヨーロッパ大陸。
それがラグランジュの解析力学によって実用的に計算可能になった。なのでラグランジュの解析力学は技術的なブレークスルーなんですけれど、秘かな波及効果もあった(^^)・・・と思う。
・それは力学は宇宙(太陽系)だけのものじゃないという、みんなの秘かな思いが地上の力学で実現した。
ニュートンは確かにそういう事をプリンピキアの中で暗にほのめかしていました。またニュートン力学を理解できれば、当然そういう事になります。プリンピキア発表から約1世紀後、世界の数人は「みんな」になった。
そして原理的にそうである事と、ニュートン力学が完全に成り立つ地上世界を眼前に目の当たりにするのとでは、雲泥の自信の差が生まれる気がします。
・そうしてニュートン力学によって全宇宙を説明できるという思いとともに、19世紀は始まった。
3.運動方程式から不要な力を消去する
以下は山本ボンのpp.308~322を参考にしています。図-1のmjの運動方程式をやや一般化して次のように書きます。
![]()
ここでFjは質量mjに対する既知の外力。図-1で言えば重力mjgです。一方Fj(e)は、拘束による力Hj,Gj,Tjの合力Hj+Gj+Tjです。ajはmjの加速度。
Hj,Gj,Tjを含んだ普通の運動方程式を書くためには、Hj,Gj,Tjの大きさと方向を拘束軌道Cとの幾何学的関係を考慮して「その運動も」、けっきょく運動方程式に未知数として含める必要があります。よってHj,Gj,Tjは運動方程式を全部解き終わった後でないとわかりません。その時にはmjの運動もわかってるのでHj,Gj,Tjもわかるのは当然なんですが、その大変さは容易に想像がつきますよね?。図-1では実質的に9個の未知数に関する連立2階常微分方程式を解く必要に迫られます(^^;)。
上記のような状況を回避するためにダランベールは、こう考えます。(1)によれば、加速度ajを発生させるような力mjajをちょうどmjajと逆向きに加えてやれば、系は静止する事になる。正確には等速度運動ですが、そこは気にしません。実質的にどうでも良いので。
![]()
「こんなのあったりメェ~じゃん!」と思うかもしれませんが、当時はこの変形さえ議論の的になりました。それはネコ先生も言っていたように、力の定義がはっきりしていなかったからです。質量mに加速度aが生じた時、maという力が本当に働いている、または本当に働いている力をmaという形で測定できるという確信がなかったからです。それには「力はどのように物体に作用しどのように物体は運動するのかさえわかれば良い」というパラダイムシフトが必要でした。力の発生機構は問題にしない、という態度です。
(2)により動力学は仮想静止系の力の釣り合い問題に帰着できます。17世紀には動力学(ニュートン力学)に先行する歴史を持つ静力学が動力学とともに整備されますが、静力学における仮想仕事の原理は、この時点で既に概ね知られていました。ダランベールともなると、完璧に知ってたはずです。「古典力学,ゴールドスタイン,吉岡書店,1978年」のpp.17によれば(以下、ゴールド本(^^))、
・仮想変位とは、各時刻tにおいて拘束に矛盾しないように取った任意の微小変位の事である。
と定義されます。つまりmaを逆向きに加えた仮想静止系では時刻tを止めてしまえば、時間に依存するかも知れない拘束も静止するので、静力学における仮想変位、
・仮想変位とは、拘束に矛盾しないように取った任意の微小変位の事である。
と同等になります。図-1では、mjは拘束軌道Cの接線方向にしか動かないので、Cの接線方向に取った任意の微小変位δrjが仮想変位になります。ただしmjの位置ベクトルをrjとします。
静力学における仮想仕事の原理によれば、δrjとmjに作用する力との内積をとればOKです。
![]()
ここで・はベクトルの内積です。Fj(e)=Hj+Gj+Tjを考慮します。δrjはCの接線方向でした。GjはCの内法線方向です。従ってGj・δrj=0になります。接線方向のHjは、Cとmjとの間に働く摩擦力と解釈できますが、ここに古典力学の特殊事情が顔を出し、Hj=0となります。
当時の最も一般的な暗黙の物質観とは、次のようなものでした。当時、分子・原子はまだ発見されていませんでしたが、漠然と物体は微粒子から構成され、微粒子間には逆2乗則に則った力が働く(斥力含む)と想定されました。この起源はもちろんニュートンの惑星運行モデルです。またニュートンの物質モデルは、分子・原子の存在が不確かでも技術的に適用可能なものでもありました。
流体力学の基礎は18世紀には整備されています。流体運動の基礎方程式は、流体を細かい微小部分に分けると、微小部分はニュートンの運動方程式に従うとして得られます。そのとき微小部分がどういう力を働かせるかは作用・反作用の法則があるので、具体的には考える必要がありません。
ニュートンの惑星運行モデルは摩擦のない世界です。従って摩擦力とは、逆2乗則に従う基本力から導ける現象論的な二次的な力であり、原理の話をする時には無視して良い事になります。よってHj=0です。この辺りは、現代だって同じですよね?(^^;)。
Gj・δrj=0とHj=0を考慮すると(3)は、
![]()
になります。この状態がよく出てくる「滑らかな曲面上に拘束された運動」です。Tjを消去するために、全てのmjについて(4)の和を取ります。
![]()
Tjはm1とm2をつなぐ伸びない糸の張力でした。糸が弛む場合は最初からTj=0とわかるので、そっちはおいときます。糸は伸びないのでした。その条件は、
![]()
と書けます。Lは糸の長さ。仮想変位は微小という事に注意しr2,r1で(6)を全微分すれば、
![]()
が得られます。ところでベクトル(r2-r1)は図-1から張力Tjの方向に平行です。例えばT1=α(r2-r1)とおける事になります。ここにαは適当なスカラー。そして作用・反作用の法則から、T2=-α(r2-r1)になるので、(7)は、
![]()
と同等です。この事態をさして「幾何学的拘束条件による抗力は、それ自身で釣り合う」と言う時もあります。
言い忘れましたが、仮想仕事の云われはわかりますよね?。力×変位(仮想変位)=仕事(仮想仕事)だからです(^^)。
(8)を(5)に適用すれば明らかに、
![]()
です。不要な力は全て消去されました。これがダランベールの原理です。一般相対性理論なんかとは全く無関係な話です(^^;)。少なくともその動機は・・・。
山本ボンpp.318には次のようにあります。
「そしてこの原理は、くどいようだが、複数個の物体が外力の影響下で相互的にも束縛力によってある関係を保ちながら運動しているときに、その未知の束縛の力を用いずに既知の力だけで表現できるというところがミソであることに留意していただきたい(*)。」
さらに(*)に対応する脚注には、
「ちなみに、束縛力がもともとないときの運動方程式F=maの右辺を単に移項してF-ma=0と書いたものを「ダランベールの原理」と称しているのをよく--特に工学系のテキストなどに--見かけるが、これは全くのナンセンスである。」
・・・まぁ~、そうなんですけど(私は工学系(^^;))。
ちなみに図-1の伸びない糸が、バネ定数kで伸び縮みする糸であったら、Tjは束縛力や拘束力ではありません。T1=k(|r2-r1|-L)nという座標によって決まる既知の力です。ここにnは(r2-r1)方向の単位ベクトル。
今日のアニソン、「アルプスの少女ハイジ」から『おしえて』 [今日のアニソン]
でも、こうした事実をもって、日本と日本人をホルホルする国粋的な日本人(の言動)は、「慎み」や「謙譲」という日本的な美徳が感じられなくて、なんか、嫌だな〜。生理的、感情的に受け入れられないにゃ。
そして、圧倒的大多数のベルギーのヒトたちは、アニメ「フランダースの犬」を見るまで、ベルギーを舞台にしたこんな児童文学が存在することを知らなかったらしい。イギリスでも小説「フランダースの犬」は忘れられた作品で、イギリス人はほとんど読んだことがなかった、というお話。イギリスの国民的作家チャールズ・ディケンズの小説「ディビッド・コパフィールド」、「大いなる遺産」、「クリスマスキャロル」などに出てくるように、イギリスの子どもは小さいうちに働きに出され、過酷な労働に耐えるから、「フランダースの犬」に出てくる少年ネロのような、生活能力や生命力を有さない、軟弱な男の子は文化的に受け入れられないのだろうか。
https://goo.gl/S8P63C
http://www.geocities.jp/timeway/kougi-88.html
劣悪な労働環境であったとされる、日本の紡績工場に働いていた女工さんたちへの聞き取り調査(1960年)は、たとえば、ここ↓に出ているにゃ。
https://goo.gl/BqceSE
つまり、世界の多くの国には、こうした子どもための文化(的な土壌とその蓄積)がないんだケロよ。あったとしても、ものすごく貧弱であった。このことは童謡(旧文部省唱歌や日本の童歌など)を見れば容易に想像がつくにゃ。その時代を代表する、一流の詩人、作曲家が子どものための優れた芸術作品を数多く作るなんて国は日本くらいしかないんだケロよ。
――武家を除く日本社会では、「うつくし(かわいい)」、「萌え」の観点から、余程のことをしないかぎり、子どものすることは何でも無条件に肯定、是認される(^^ゞ――

案の定、オリバーのお父さんは、オリバーとジェニファーの恋と結婚に強く反対し、一人息子のオリバーと絶縁状態になってしまう。卑しいイタリア移民の血が由緒正しい家系の血に交じることが、オリバーのお父さん耐えられないし、許せないんだケロ。
今日のアニソン、「グイン・サーが」から『Saga~ This is road』 [今日のアニソン]
微分方程式のべき級数解1 [微分方程式の解法]
微分方程式のべき級数解1
つぎの微分方程式
![]()
の整級数解(べき級数)について考えることにする。
この微分方程式の解yが
![]()
とx=0まわりの整級数に展開できるとする。
このとき、上の整級数は−∞<x<∞で項別微分が可能(註1)で
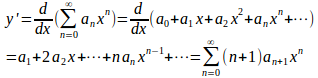
となる。
これを微分方程式y'=yに代入すると、
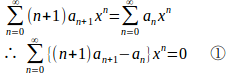
任意のxについて①が成立するためには、①の無限級数内の![]() の係数がすべて0でなければならない。
の係数がすべて0でなければならない。

さて、y(0)=1だから、a₀=1。
したがって、上の漸化式で定められる数列 ![]()
これから、
![]()
となり、微分方程式y'=y (y(0)=1)の解![]() と一致する。
と一致する。
註1
定理 整級数![]() の収束半径をρとする。
の収束半径をρとする。
このとき、
![]()
で、![]() は−ρ<x<ρで
は−ρ<x<ρで![]() 級である。
級である。
問1 次の微分方程式のx=0まわりの整級数解を求めよ。
![]()
【解】
![]() とすると、
とすると、
![]()
さらに、
![]()
これらを微分方程式に代入すると、

したがって、
![]()
でなければならない。
したがって、
![]()
x=0のとき、
![]()
よって、
![]()
これより、
![]()
したがって、
(解答終)
問2 次の微分方程式のx=0まわりの整級数解を求めよ。
![]()
【解】
![]() とおくと、
とおくと、

また、
![]()
これらを微分方程式に代入すると、
よって、
a₁は初期条件y(0)から定まる。
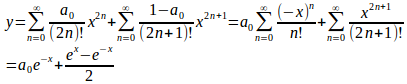
よって、
![]()
(解答終)
今日のクラシック、アーサー・サリヴァン作曲 交響曲ホ長調『アイリッシュ』 [今日のクラシック]
そして、第4楽章は、再び、メンデルスゾーン的になり、この作曲家の独自性、個性といったものを感じることができなかった。
シューマン、シューベルトの影響を指摘する音楽評論家、研究者もいるようですが、 全体的に、アーサー・サリバンの交響曲は劣化版メンデルスゾーンといった感じ。しかも、作曲の様式も初期ロマン派の枠内にとどまっていて、サリヴァンが生きていた時代からしても、既に時代遅れの音楽だよね〜。
サリヴァンの交響曲『アイリッシュ』が発表されたのは1866年で、これとほぼ同時期の1865年にドヴォルザークは習作臭の強い交響曲第2番(1865年)を作曲しているので、この2曲をあわせて聞いてみると面白いのかもしれない。
『アイリッシュ』はサリヴァンが20代前半の曲であり、後に花開く才能の片鱗は十分に窺えるが、有名な大作曲家・ドヴォルザークもこの年齢のときにはこの程度の曲――作曲約20年後の1887〜1888年に、冗漫な箇所を削除するなど改訂。それでもまだ冗漫で、唐突感のある箇所が多数存在し、ごった煮感が強い――しか作れなかったのだから、『アイリッシュ』一曲をもって、作曲家サリヴァンを評価してはいけないのだろう。
衣装以外、日本的な要素はありませんが、オペレッタというよりもミュージカルに近いので、見やすい、聴きやすい動画ですよ。



