今日のアニソン、「決断」から『決断』 [今日のアニソン]
肝心の輸送作戦には失敗――上のアニメンタリーだと輸送任務に成功したように描かれているけれど、戦闘開始前に、実際は、物資を詰めたドラム缶のほとんどを投棄――するし、戦闘指揮らしい指揮をせずに、魚雷を打つと、他の鑑を置き去りにして、自分はいち早く戦場から離脱したなどの理由から、その後、「華の二水戦」の司令官を解任される憂き目にあっている。
なお、田中司令官は、スラバヤ沖海戦のとき、艦これで人気の「神通」に乗っていた。
[落ちる」ってどういうこと? [ddt³さんの部屋]
[落ちる」ってどういうこと?
プロゲラさんへ。とりあえず質問には答えません。以下を読んでみて納得し難かったら、また質問を下さい(^^;)。
円軌道を描く人工衛星は(中身も含めて)、向心力(重力)と遠心力が釣り合うので落下しない。・・・間違いとは言いませんが、危険思想です!。それは遠心力を実在する力とみなす事になるからです。遠心力を実在する力とみなしちゃ駄目なのか?。駄目です!。
現代物理は17~19世紀のニュートン力学の時代よりも、ある意味もっと素朴な発想をします。
・実在する力には、力の発生源があらねばならない。
向心力である重力には、地球という発生源があるので実在の力だ。それが観測結果だ!という訳です。では遠心力に発生源はあるのか?。遠心力は物体が回転する時にしか発生しない。物体が回転する/しないは、人間が恣意的に決める事さえできる。また遠心力は、宇宙のどんな場所においても、原理的には発生されるのが可能だと考えられる。にも関わらずそれは、あたかも逆向きの重力のように作用する。
宇宙空間には、回転した時だけ反重力作用を及ぼすような「隠れた質量」が充満してるとでも言うのか?。そんなの嘘だ!(^^)。
この状況を整理するには、地球に静止した座標系で運動を記述するのが一番です。つまり実在する力である(あろう)重力のみを用いて、遠心力を導ければ良い訳です。そうするとこの世には、とりあえず重力による向心力しかない事になります。
でもでもぉ~、ガンダムの宇宙世紀の細長いシリンダーを回転させた宇宙コロニーの中で、アムロは遠心力による重力を感じていたぞ。それはどうなる!。
・だから重力しかない状況から、座標変換で遠心力を導いてさしあげますって(^^;)。
要するに地球に静止した座標系から、人工衛星に対して相対静止した座標系に移り、運動を記述し直すんです。これの物理的意味は、人工衛星に乗ってる自分と人工衛星との相対運動を表します。人工衛星に対して相対静止した座標系の座標値は、地球に静止した座標系の値で表す事が可能です。
図-1は、人工衛星が軌道半径Rを一定角速度ωで地球周回してるという絵です。地球に静止した座標系(X,Y)から人工衛星に対して相対静止した座標系(x,y)への変換は、次式になります。
![]()
変換は2段に分けて考えると便利です。(1)の右辺の行列の後の()内は、図-1の(X,Y)から(x',y')への変換を表します。これは座標系の原点の+R(cosωt,sinωt)の平行移動です。(1)でRの符号が-なのは、図-1で軌道半径Rに沿って、座標系(X,Y)から(x',y')まで移動する過程を想像すれば明らかです。
R(cosωt,sinωt)だけ座標原点がずれれば、外の景色は(x',y')までに逆向きに-R(cosωt,sinωt)だけ動きますよね?(^^)。
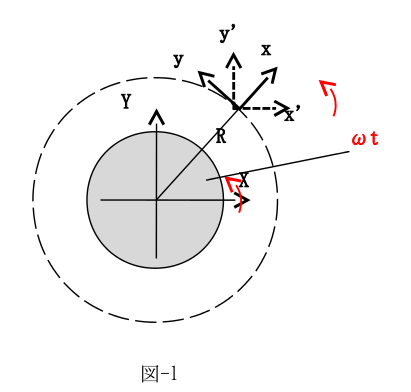
次に(x',y')系を(x,y)系に重ねるために、左へωtだけ回転させます。回転角がωtなのは、それが半径Rの回転角と同じなのは、図-1から明らかですよね?。左へωt回転さす操作が、(1)右辺の行列です。ただしこれも-ωtの回転を表します。自分が左へ回転したら、外の景色は右回りに回転しますよね?(^^)。
(1)を(X,Y)=の式に直します。申し遅れましたが、tは時間です。
![]()
こうするのは、これを地球に静止した座標系(X,Y)で記述された運動の運動方程式(3)に使いたいからです。
![]()
(3)においてFは人工衛星に作用する重力,mはその質量です。(2)を(3)へ代入し、(x,y)で運動方程式を記述し直すためには、(2)の時間に関する2階微分を計算する事になります。微分はやりゃ~必ずできます。
だから地道に頑張ります(^^;)。
相対速度が0なら、相対加速度を含む3項目も0なんですが、次のステップでの式整理を容易にするために、0である事をおぼえておいて残しておきます。よって(4)の(3)への代入結果は、
![]()
になります。ところで重力Fは図-1を参照しつつ詳しく書くと、
![]()
なのでさらに、
![]()
を得ます。(7)右辺1項目の加速度項を見ると、前にかかっている行列を除いて(3)右辺と同じ形をしています。これの物理的に意味するところは、まだ変換は完了していないという事です。
そもそもの目的は(x,y)系で(自分座標系で)運動を記述し直す事でした。そのために(X,Y)系での運動方程式(3)に手を付けたのでした。目標は(x,y)系での運動方程式です。運動方程式は直接、[力=質量×加速度]の形をしていなければなりません。従って(7)右辺1項目の加速度ベクトルを裸にする必要があります。そのために前にかかっている行列の逆行列をかけます。するとなんと、

の形になります。運動方程式として正規の形にすれば、
![]()
です。(8)右辺は、自分座標系での[質量×加速度]の形をしているので、左辺は人工衛星としての自分が「現実に」感じる力です。何故なら重力しかない現実の状況から出発して、座標変換のみに基づいて自分座標での[質量×加速度]を数学的に導いたものだからです。
ここで相対加速度は0なのを思い出すと、(8)のy方向の成分は全て0になります。そこで、
![]()
![]()
となり、遠心力と重力が釣り合うという関係が得られ、無重量状態になります。
でもですね、さっき(8)左辺は人工衛星が「現実に感じる力」だと書きましたが、それは(9),(10)から0になるのがわかります。だとしたら結局のところ遠心力mv2/Rは感じられないのです。こんなものを、観測できないものを考える意味なんてあるんでしょうか?。
それがあるんです。
何故なら遠心力は、実在する力に変換して測定できるからです
円筒殻といっしょに回転してるので、自分は常に円筒殻の軌道速度vで円筒殻の接線方向に飛び出そうという速度を持ちます。円筒殻が本当に何もしてくれければ、本当に宇宙コロニーから接線方向に飛び出し、真空の宇宙空間で内圧爆死するはずです。しかし宇宙コロニーのシェル(殻)は、自分とコロニーの相対位置が変化しないように、ちゃんと押してくれます。その力はmv2/Rの「向心力」です。何故なら、自分は円筒殻といっしょに回転してるからです。コロニーに静止した座標系で運動方程式を立てると、向心力はmv2/Rでなければならない事がわかります(図-2の赤矢印)。
この「向心力」は「接触力」と言われる実在の力です。その発生源は、シェルが自分を押す事によって発生するシェルの変形に起因する弾性力です。
しかし自分はこの力を、「遠心力」と誤解して体感します。だってあたかも地面であるシェル方向に自分を引っ張る(もしくは押す)力と感じるからです(図-2の赤点線矢印)。これが疑似人工重力の正体です。
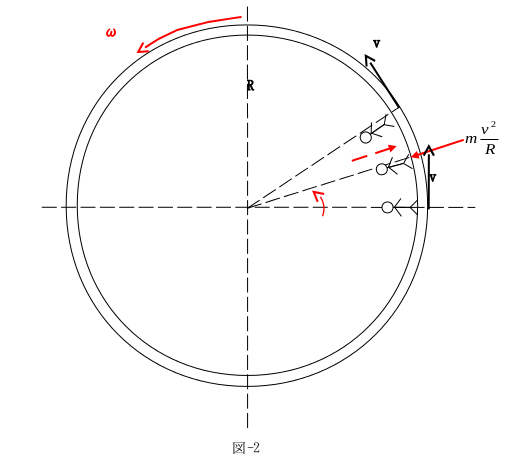
でも上記の理屈は、自分と円筒殻が接触している限りにおいてではないでしょうか?。なので検証として、図-2の最初の位置で垂直跳びのようにジャンプしたとします。
話を単純化するために、一瞬である高さまで跳んだとします。足裏が床から離れた瞬間に何の力も受けなくなるので、その時に手にした水平方向(左向き)の移動速度だけがが残ります。そして接線方向へ飛び出そうとする軌道速度vは、そのまま維持されます。この瞬間に自分のジャンプは、コロニーに静止した座標系では等速直線運動になります。
ところがその運動を図-3に示した自分座標系で記述し、地面(シェル)からの離れを追うと、何故かちゃんと重力加速度mv2/R/g×1Gの自由落下になっています。そのとき不可欠なのが、座標変換によって現れる、式(10)の「遠心力mv2/R」です。でもやはりmv2/Rは観測できません。だって自由落下に見えるものは、重力も何もない状況下での本当の等速直線運動なんですから。作用する力は全くありません。しかし運動方程式の辻褄は常に合うんですよ。
これは何故でしょう?。
もう一度問います。遠心力は実在の力でしょうか?。実在の力ではないはずです。
何故ならそれは、座標変換に由来する数学的な付加項として導けるものだからです。本当に実在するのは、地球に静止する座標系で考慮された重力だけのはずです。しかし遠心力を考慮すると、どんな自分座標系においても、運動方程式の辻褄は常に合います。
さっきの垂直跳びは疑似重力下での自由落下です。それを地球上での垂直跳びの自由落下と同じになるなどとどうして言えますか?。じっさいその運動を、正しい(本当の?)運動方程式を与えると考えられるコロニー座標系で記述してみると、自由落下という加速度運動どころか、たんなる等速直線運動でした。でも自分座標系では予想通り(?(^^;))、自由落下になります。そんな事は普通ないはずです。
これの物理的に意味するところは、運動方程式という運動法則は「いつでもどこでもどんな条件下でも常に正しい」という経験事実で、後に論理的に確認されます。これを物理法則の不変性と言います。
物理法則が不変だからこそ、人工衛星の自分座標で運動を記述しても、宇宙コロニーの垂直跳びを自分座標で記述しても、「遠心力を考慮すれば」いつも妥当な結果が出てきます。そういう意味で「遠心力」は実在はしないが、力学にとって必要不可欠なものです。こういう座標変換によって現れる付加項を一般に、「慣性力」と呼び、「数学的な見かけの力」とも呼ばれます。そして「見かけの力」の具体的効果は測定可能です。例えば北半球での台風の左巻きは、ここでは省略したコリオリの力と言われる見かけの力の効果です。
これらを摩訶不思議なものだとは思わないで下さい。妥当になるのには妥当になるだけの数学的理由があります。それが論理的確認です。
でも以上の立論には、マッハ先生の反論ミサイルが飛んでくるんですよね。それは次回という事で(^^;)。



