今日のアニソン、「ダンガンロンパ 希望の学園と絶望の高校生」から『Never Say Never』 [今日のアニソン]
[擬ベクトルの話] [ddt³さんの部屋]
[擬ベクトルの話]
[問2]から[問4]まで直交行列、すなわち回転,回転,回転・・・で攻めたので、最後に擬ベクトルに関する無駄話を一つ(^^;)。
1.3次元で回転方向はどう定義すべきか?。
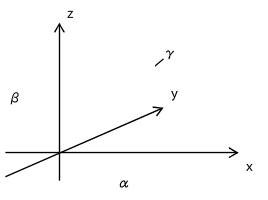
図-1
じつは3次元では、図-1のように回転方向をとるのが標準なのです。z軸まわりとしてxy面内でx→y方向,x軸まわりとしてyz面内でy→z方向,y軸まわりとしてzx面内でz→x方向。
xy面内でx→y方向とyz面内でy→z方向はいいですよね?。普通の左回りの角度の測り方(^^)。でも何故、zx面内ではz→x方向なんでしょう?(^^;)。というかそもそもなんでxz面っていわないの?。xz面内でx→z方向と回転方向を定義すりゃ、すっきりするのに・・・。
じつは回転方向を、x→y,y→z,z→xで定義した方が便利なのです。
2.3次元の回転行列
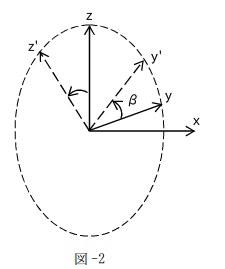
回転を表すためには、座標系の回転を考えるとわかりやすいです。例えば図-2は、x軸まわりの回転βを表します。この回転による点変換は、
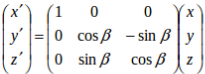
(1)
ですよね?。xy平面内の回転がyz平面で起こっただけですよね?(^^)。
ただしβは回転変位なので、(x,y',z')系における座標ではなく、![]() の回転で実際に点が行く先を、(1)は計算してます。y軸まわりなら、
の回転で実際に点が行く先を、(1)は計算してます。y軸まわりなら、
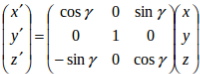
(2)
です。ここでsinの符号が変わるのは、γ正方向をz→xに取るからです(x→zに取りたいところですが(^^;))。
z軸まわりなら見なれた形、
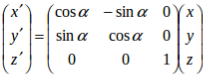
(3)
になります。
そういう訳でz軸回りにα,y軸回りにγ,x軸回りにβ回転したなら、

(4)
と書けます。
・・・ところが行列の積って一般に非可換ですよね。って事は、(4)右辺の行列の積の順番を変えたら結果が変わる(じっさい変わります(^^;))。z軸回りにα,y軸回りにγ,x軸回りにβ回転したのと、後半二つの回転を入れかえたz軸回りにα,x軸回りにβ,y軸回りにγ回転と、最初のを逆順に行った回転では、3通り全部結果が違う!。それどころか、z軸回りにα回転してからy軸回りにγ回転してからx軸回りにβ回転するのではなく、全部同時に起こるかも知れません。
これらの事実は、本来は回転を(4)のように表すべきでない、という事を意味します。回転はあくまで回転軸が先にあり、その回りで回るです。しかし実用上多くの場合で微小回転を取り扱います。微小回転の場合、回転の順番は可換になります。
2.微小回転を定式化する
Rを、n次元の直交行列(回転行列)でしかも微小回転を表すとします。n次元空間の一点を位置ベクトルxで表すと、xの移動先はRxです。この回転はもちろん、原点を回転中心とした回転です。
![]()
(5)
を考えると、Δxは回転による変位ベクトルを表します。Eは単位行列です。Rが微小回転を表すなら、Δxも微小でなければなりません。(5)で|x|は普通の大きさを持ってますから、これはε=R-Eの成分が微小である事を意味します。εは微小な行列で、
![]()
(6)
と書けます。ここでRは直交行列なので、R-1=Rt=Et+εt=E+εtです。従って、
![]()
ですが、εεtを2次の微小量という事で落とすと、
![]()
(7)
が得られます。(7)は、反対称行列の定義そのものです。すなわち、微小回転変位を与える行列εは、反対称行列です。また2つの微小回転RとR'を考えると、
![]()
(8)
になるので(2次の微小項は落とす)、2つの微小回転の変位は、回転変位の和となり、微小回転の順番は可換です。
3.外積を導入する
微小回転変位の行列εは反対称行列でした。そこで3次元で反対称行列とベクトルとの積を考えます。
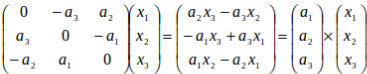
(9)
ここで反対称行列の成分a1,a2,a3は任意ですから、3次元の反対称行列一般とベクトルとの積は、じつは外積で書けるのがわかります。外積とは3次元の微小回転を扱う上で、特に便利な省略記法だったのです。
「3次元の」という限定を付けるのは、一般にn次元での反対称行列の独立な成分は、n<(n2-n)/2となり、次元nに等しい成分を持つベクトル形式に略記できないからです。n=3の場合は(32-3)/2=6/2=3となり、3次元ではたまたま(9)が可能というだけです。外積の正体は、反対称行列とベクトルとの積です。その事をはっきり示すために、(9)の反対称行列を、
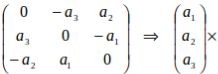
(a)
と略記します。
3次元でx軸,y軸,z軸まわりの微小回転を表す(1)(2)(3)は、α→0のときcosα→1,sinα→αなどになる事に注意し、E分を除いて(a)の形に整理すると、

(10)
へ化けるのがわかります。
なんとも綺麗にまとまるじゃないですか!。i,j,kはx方向,y方向,z方向の単位ベクトルで、i×,j×,k×は(1),(2),(3)すなわち、x軸,y軸,z軸回りの回転に対応しています!(^^)。これがy軸まわりの回転では、z→x方向を正方向に選ぶ理由です。
そうすると(4)は、α,β,γが微小な時、

(11)
てな事になります。ただし外積の線形性を使いました。
(4)と同様に(11)を、回転する前の点の座標(x,y,z)にかけましょう。
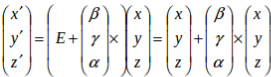
(12)
(12)で(x',y',z')は、回転後の点の座標です。これと(x,y,z)との差が、回転によって起こった変位という事になります。
(13)
(13)の右辺を見ると、「回転軸が(β,γ,α)の微小回転変位」という意味になってるじゃないですか!。このとき回転角の大きさωは、
![]()
という事になります。一方、
![]()
は、回転の腕の長さ(を、回転軸と腕の成す角θのsinθで割ったもの)です。微小回転変位の場合、変位はほとんど直線と変わらないので、微小回転角が、α,β,γに関する三平方の定理で与えられるのは妥当だと、すぐにわかります。
最後に(13)の座標変換に対する変換性を調べます(^^)。
(次回に続く )
(執筆:ddt³さん)



