続・ローレンツ変換の”よもやま話” [ねこ騙し物理]
続・ローレンツ変換の”よもやま話”
前回、双曲線関数

を紹介すると同時に、この双曲線関数を用いるとローレンツ変換は次のように表すことができるという話をしたにゃ。
![]()
ここで、オイラーの関係式
![]()
を思い出して欲しい。
この(4)式から、
![]()
という関係式が直ちにえられ、(4)、(5)をcosθとsinθについて解くと、次の関係式が得られる。

そして、前出の双曲線関数を用いて書き換えると、次の関係を得ることができる。

さらに、この関係式から、

という関係が得られる。
この関係をローレンツ変換の変換式(3)に代入すると、
![]()
φ=iθとおき、実数の角度θではなく、純虚数の角度φを導入すると、ローレンツ変換の変換式は
![]()
となり、2次元ユークリッド空間の原点Oまわりの回転による座標変換の式
![]()
とよく似たものになるのであった。
2次元ユークリッド空間の原点まわりの回転による座標変換の式では、
![]()
になるケロ。
そして、(9)式で表される原点まわりの回転(?)によっては、
![]()
になるってわけだわさ。
ローレンツ変換や相対性理論が活躍する舞台は、ユークリッドの幾何学が成立するユークリッド空間ではなく、非ユークリッド幾何学が幅を利かす非ユークリッド空間だから、ユークリッド空間の常識なんて通用しないんだケロ!!
ローレンツ変換の”よもやま話” [ねこ騙し物理]
ローレンツ変換の”よもやま話”
この式を見て、なにか気づかないケロか?
![]()
ここで、cは光の速さ、sはローレンツの不変量。
y=ctとおき、s=1とすると、
![]()
になるんだケロ。
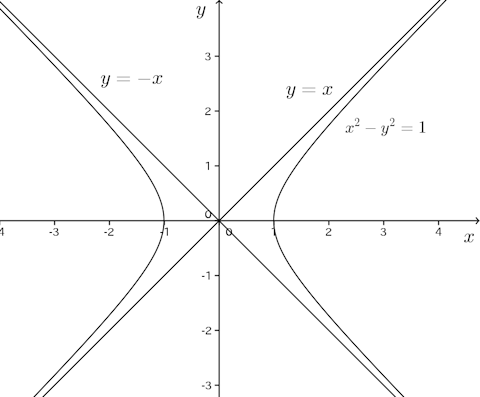
(1)は双曲線で、次のようなグラフになる。
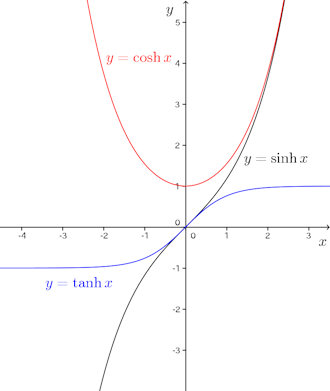 さてさて、ここで何の脈絡もなく、次の関数(双曲線関数)を定義する。
さてさて、ここで何の脈絡もなく、次の関数(双曲線関数)を定義する。

すると、
![]()
になる。
したがって、
![]()
とおくと、双曲線(1)は
![]()
になるにゃ。
なぜ、この関数を双曲線関数と呼ぶかわかったケロか。
このほかに、

三角関数はこうだろう。

一方、双曲線関数は

と、似たような性質を持っている。
三角関数にはタンジェントtan x があるから、
![]()
と定義したくなるのは人情というもの。
そして、この微分を求めると、
![]()
となりまして、
![]()
と同じような形になる。
問 次の公式を示せ。
![]()
さてさて、ローレンツ変換は、
![]()
だにゃ。
行列で書くと、
![]()
ここで、
![]()
だケロ。
したがって、
![]()
になる。
そこで、α、αβを双曲線関数を用いて、
![]()
とおくと、ローレンツ変換は
![]()
になる。
この式は、原点まわりの回転
![]()
とよく似ているにゃ。
まっ、原点まわりの回転の場合は、x²−ct²がはなく、
![]()
が不変量になるという違いはあるんだけれど・・・。
ddt³さんが「ローレンツ変換は原点まわりの回転のようなもの」というのは、こうしたことを踏まえての発言なんだケロよ。
この曲をセレクトしたのには、深い意味があるにゃ。
だって、ローレンツの不変量s²は、虚数単位iを用いると、
![]()
と書けるんだから。
さらに、実数という制約を捨て、さりげなく、ローレンツ変換を
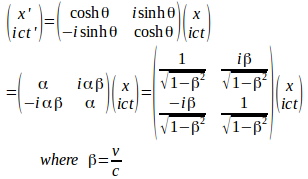
と書き換えるにゃ。
これでだいぶ回転らしくなったケロ。
こうすると、
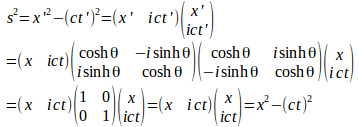
となり、s²=x²−(ct)²はこの座標変換によらず一定の量となる。
s²=x²−(ct)²は、通常の空間での距離ではないけれど、この虚数単位iが入った不思議な空間の距離みたいなものになるってわけだわさ。
特殊相対性理論とローレンツ変換 [ねこ騙し物理]
特殊相対性理論とローレンツ変換
アインシュタインの特殊相対性理論の仮定は次の2つ。
1 物理法則はどの慣性系でも同一。(相対性)
2 光速cは観測者および光源の速度によらずどの慣性系でも同じ一定の値cをとる。(光速度不変の原理)
時刻t=t'=0で静止している座標系Sとx方向に一定速度Vで移動している座標系S’の原点は一致しているとする。このとき、
![]()
である。
時空の一様性からx'とxは次のような1次式で表されなければならない。
![]()
静止している座標系Sからみると、x方向に一定速度Vで移動している座標系S'におけるS’の原点のO'の座標x'=0は座標系Sのx=Vtになる。
したがって、(1)式は
![]()
の形になるであろう。
ここで、1の相対性より、x、tを入れ替え、さらにVを−Vに置き換えると、
![]()
時刻、t=t'=0に座標系Sと座標系S'の原点を出た光は、2の光速度不変の原理から、x=ct、x'=ct'の位置にある。
t=x/cを(2)式に、t'=x'/cを(3)に代入すると、

となる。
(4)と(5)の左辺、右辺を掛けると、
![]()
xx'≠0だから、両辺をxx'で割ると、

ここで、β=V/cとおくと、
![]()
これを(2)、(3)式に代入すると、

という変換式が得られる。
これをt,t'について解くと、

となる。
この(6)〜(9)式をローレンツ変換という。
行列を用いて表すと、ローレンツ変換は次のようになる。

V>cのとき、つまり、β>1のとき、![]() は虚数になるので、光速cより速く運動できないということになる。
は虚数になるので、光速cより速く運動できないということになる。
また、

となるので、s²=x²−(ct)²は不変量(ローレンツ不変量)である。
インチキなローレンツ収縮の説明
![]()
を固有の長さという。
x方向に等速度Vで動いている座標系Sのx₁'、x₂'の静止している座標系Sにおける値をx₁、x₂とすると、

になる。
したがって、

したがって、運動している物体は運動方向の長さが![]() の割合で縮むことになる。
の割合で縮むことになる。
これをローレンツ収縮という。
このローレンツ収縮の話には少しインチキが入っているので、 注意が必要だにゃ。
ネムネコ、量子力学する [ねこ騙し物理]
ネムネコ、量子力学する
何でも、量子力学には、
![]()
といった深い井戸のポテンシャルモデル(箱型ポテンシャル)とかいわれるものがあるそうだ。ここで、Vはポテンシャル。
これが何を意味するのか、物理屋さんではないネムネコにはわからないけれど、解いてみようじゃないか。
シュレディンガーの波動方程式を立てて解くのが本筋なのだろうが、そんな面倒なことはしたくない。
伝え聞くところによると、電子などの量子は波のようなものらしいので、波動関数(?)をφとおくと、きっと波動関数(?)φは次のような形になるはずだにゃ。
![]()
x=0、x=Lのとき、ポテンシャルが無限大なので、たぶん、x=0、x=Lのとき、
![]()
という条件になるに違いない。
(ポテンシャルが無限大なので、トンネル効果で、電子はこのポテンシャルの壁からしみだせない!!)
すると、
![]()
A=0じゃないとすると、

したがって、
![]()
伝え聞くところによると、波動関数φの2乗は確率(密度)になるらしいので、
![]()
という条件が課せられるはず。
これを計算すると、

よって、
![]()
が、この深い井戸ポテンシャル(箱型ポテンシャル)に閉じ込められた電子1個の波動関数になる。
なお、![]() と波動関数に下付きのnをつけたのは、n=1,2,3・・・といった自然数に対応させたから。
と波動関数に下付きのnをつけたのは、n=1,2,3・・・といった自然数に対応させたから。
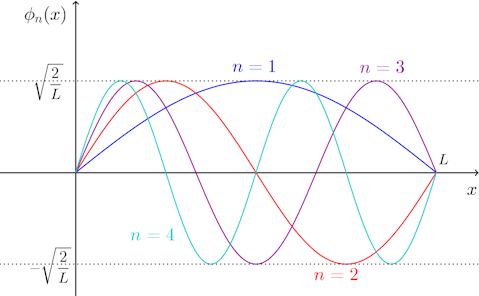
さて、上の図を見ると、波動関数の波長(?)λの半分λ/2の整数倍がLになっていることがわかる(定常波)。
つまり、

ってわけだ。
ここで、ド・ブロイ波の関係式
![]()
を引っ張りだすにゃ。ここで、hはプランク定数。
これから、電子の運動量pは
![]()
となる。
ここで、mは電子の質量、vは電子の速さだ。
したがって、電子の速さは
![]()
となるので、電子のもつ運動エネルギー![]() は
は
![]()
になる。
なんでも、量子(電子)の振動数をνとすると、
![]()
になるらしいから、

これが振動数ってことになるケロか。
問題1
![]()
と
![]()
を用いて、次の微分方程式(時間を含まないシュレディンガーの波動方程式)を導け。
![]()
また、この微分方程式を境界条件φ(0)=φ(L)=0で解くことにより、①と②を求めよ。
この結果は、シュレディンガーの波動方程式を解いて求めた結果と一致するんだにゃ。すごいケロ!!
ところで、波動関数![]() を重ねあわせた、
を重ねあわせた、
![]()
も波動関数になるはずだケロ。
例えば、バイオリンなどの弦の振動は、基準音の倍音成分を含む振動が合わさったものだにゃ。バイオリンの音は、ある特定の周波数だけの純音じゃ〜ない。
波動関数は、おそらく、このような絶えなる調べを奏でているに違いない。
とすると、この混ざり合った波、波動関数(?)は
![]()
という条件を満たさないといけないはずである。
この計算は大変そうですが、これを計算すると、
![]()
になるにゃ。
![]()
だから、こうなるんだケロ。
問題2
![]()
のとき、
![]()
となることを示せ。
このいろんな倍音成分(?)を含んだ⑨³で与えられるφなる波動関数、つまり、0から無限大までの運動エネルギーや運動量をすべて持ち合わせた一つの電子が観測されるなんてことはない。
観測されるのは、⑨式で与えられるある一つのエネルギーをもった電子だけだケロ。
これは、観測すると、⑨³であった波動関数が、(1)式で与えられる一つの波動関数のみになってしまうということを意味するケロか。
言っておくけれど、観測するまで、
![]()
のどれが出るかなんてわからないケロ、予測はできないんだケロよ。
n=1,2,3,・・・のどの![]() も候補になりえるんだから。
も候補になりえるんだから。
つくづく不思議な学問だね〜、量子力学って。
シュレ猫は、箱に入れられた瞬間に、その像がぼやけてしまうというし、ネムネコには量子力学の話はついていけないにゃ。

ガリレオ変換 [ねこ騙し物理]
ガリレオ変換
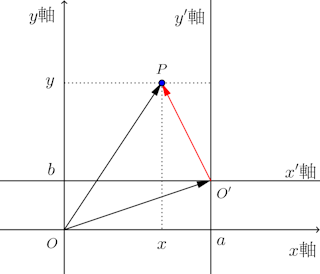 図に示すようにO-xy座標系とこれをOO'平行移動させたO-x'y'座標系があるとする。
図に示すようにO-xy座標系とこれをOO'平行移動させたO-x'y'座標系があるとする。
O-xy座標系における点Pの座標を(x,y)、点O’の座標を(a,b)とすると、O-x'y'座標系における点Pの座標〈x',y'〉は、
![]()
になる。
このあたりの話は、ベクトルを使って議論した方がわかりやすいのかもしれない。
![]()
x軸(x'軸)に平行でその正の向きで長さ1のベクトルを![]() 、y軸(y'軸)に平行でその正の向きで長さ1のベクトルを
、y軸(y'軸)に平行でその正の向きで長さ1のベクトルを![]() とすると、
とすると、
![]()
となり、
![]()
となる。
一方、
![]()
おけば、
![]()
となり、ベクトルの相等の定義から(1)式が出てくる。
これならば、怪しげな記号〈x',y'〉なるものを使わなくてすむので(^^ゞ。
さてさて、O'-x'y'座標系がx軸の正の方向に一定速度uで移動するとする。
つまり、O'-x'y'座標系は慣性系ってわけ。
議論を簡単にするために、時刻t=0のとき、OとO'を一致させるケロ。
すると、O'-x'y'座標系における点Pの座標〈x',y'〉は、
![]()
となる。
これがガリレオ変換と呼ばれるもの。
(2)式を時間tで微分すると、
![]()
さらに、(3)式を時間tで微分すると、
![]()
となる。
ここで、
![]()
である。
さてさて、ここで、ニュートンの運動方程式が登場する。
点Pで表される質点Pの質量をmとすると、ニュートンの運動方程式は、
![]()
になるにゃ。ここで、f₁とf₂は質点Pにはたらく外力のx(x’)成分、y(y')成分だにゃ。
この運動方程式は、静止しているO-xy座標系の運動方程式。
そこで、(4)式をもちいて、O'-x'y'における運動方程式に書き換えると、
![]()
となり、O-xy座標系で運動方程式を立てようが、O'-x'y'座標系で運動方程式を同一の形になる。
つまり、ニュートンの運動方程式はガリレオ変換によって不変というわけだわさ。
と同時に、同じ形になるので、静止している座標系O-xyで運動方程式を立てようが、等速直線運動をしている慣性系O'-x'y'座標系で運動方程式を立てようが、構わない。
もっと突っ込んで言うと、ニュートンの運動方程式は同じ形になるので、ニュートンの運動方程式からは、ドッチが一定速度で動いていて、ドッチが静止しているかわからないんだケロ。
次に、座標系O'-x'y'が一定速度でなく、一定の加速度αで運動している場合について考えるにゃ。
このとき、(2)式は次のようになる。

これを2回時間tで微分すると、
![]()
となる。
O-xy座標系で運動方程式を立てると、
![]()
だから、(6)式の結果を用いて、O'-x'y'座標系のそれに書き換えると、
![]()
となり、今度は運動方程式の形が変わってしまう。
x軸の正の方向に加速度αで座標系が動いていると、外力の他に加速度とは別に、反対向きの方向に−mαという力が質点に働いているように見えるんだケロ。
急ブレーキをかけると、乗っている人の体は前につんのめるだろう。エレベーターが下に降りる瞬間、フワッと体が軽くなったように感じるだろう。
これは、慣性系ではない、加速度一定で運動する座標系で運動方程式を立てることによって生じる、加速度と反対方向に働く見かけ上の力だにゃ。
だから、加速度αで加速度運動をする座標系をあたかも静止している座標系のごとく考えて運動方程式を立てるときには、外力の他に加速度の方向とは逆の力−mαを加えないといけないんだケロ。
さて、ここで問題です。
生まれてからこの方ずっと一定の加速度が常にかかっている環境で生まれ育ったヒトは、生まれ育ったところが一定の加速度をもって運動していることがわかるでしょうか。
このことを確かめる方法はあるんでしょうか。
人類は長い間、太陽や星々は地球のまわりを回っていると信じて疑わなかった。そして、ネムネコは、未だに地動説ではなく天動説の世界で生きている(笑)。
質点系の力学 第4回 ロケットの運動 [ねこ騙し物理]
質点系の力学 第4回 ロケットの運動
時刻tと時刻t+dtのあいだにロケットの質量がmからm+dmに変化したとする。dm<0で、−dmのガスをロケットに対し一定の速さuで後方に噴出し、これによりロケット本体の速度はVからV+dVに増加するとする。
このとき、ロケットと噴出されたガスを合わせた運動量は
時刻tのとき P=mV
時刻t+dtのとき ![]()
2次以上の微少量を無視すれば、
![]()
外力の総和をFとすると、運動量と力積の関係から
![]()
なので、

という運動方程式を得る。
ロケットではdm/dt<0だから、(1)の右辺第2項は正となり、ロケットの速度Vを増加させる働きをもち、この項をロケットの推力という。
さて、地表から鉛直上方にロケットを打ち上げる場合、空気抵抗を無視するとロケットにはたらく外力は重力−mgのみなので、
![]()
である。
これを(1)に代入すると、
![]()
となる。
t=0におけるロケットの質量をm₀、ロケットの燃料消費が一定で、ロケットの質量が一定の割合で減少するとし、
![]()
とおくと、
![]()
これを(2)式に代入すると、

これをt=0、V=0の条件で解くと、
![]()
になる。
Ctが1に対して十分に小さいとき、
![]()
なので、ロケットを打ち上げるためにはuC>gでなければならない。打ち上げ時にこの条件を満たさないとき、ロケットは上昇することができない。
打上げ時の質量m₀のうちの燃料以外のロケット本体の質量をMとすると、燃料を全て消費するまでの時間![]() は
は
![]()
より、
![]()
したがって、燃料を全て使い切った時ののロケットの速度は、
![]()
になる。
(参考: 小出昭一郎 力学 岩波出版)
らしいケロ。
地表から高さ100km以上の地点と地表での重力加速度の違いは、ニュートンの万有引力法則から、

程度なので、国際宇宙ステーションの高さ(地表から約400kmの高さ)までロケットを打ち上げないのならば、重力加速度は地表の重力加速度g=9.80(m/s²)で一定とみなしてもいいのかもしれないね。
質点系の力学 第3回 重心の運動と重心まわりの運動 [ねこ騙し物理]
質点系の力学 第3回 重心の運動と重心まわりの運動
§1 運動エネルギー
質点系の重心の位置をR、各質点の距離をr、さらに重心に相対的な各質点の位置を![]() とすると、
とすると、
![]()
これを成分で表すと、
![]()
時間で微分すると
![]()
したがって、質点系の運動エネルギーKは

となる。
ところで、
![]()
と重心の定義
![]()
を比較すると、
![]()
であることがわかる。
これを時間で微分すると、
![]()
よって、運動エネルギーKは
![]()
質点系の各質点の全質量を
![]()
で表わせは、質点系の運動エネルギーKは
![]()
となる。
すなわち、質点系の運動エネルギーは、重心運動のエネルギーと、重心まわりの相対運動の運動エネルギーの和になる。
§2 角運動量
![]()
(1)式に(2)式を代入すれば、![]() は
は
![]()
となるが、
![]()
だから、右辺の第2項、第3項は消えて、
![]()
になる。
これを時間で微分すると、

になる。
一方、(1)の右辺は
![]()
となるが、![]() であるから、
であるから、
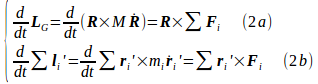
と、角運動量も、重心に全質量が集中したと考えば場合の式(2a)と、重心のまわりの相対運動に関する式に分離できる。
「お前ら、こういう問題は得意?」の答 [ねこ騙し物理]
「お前ら、こういう問題は得意?」の答
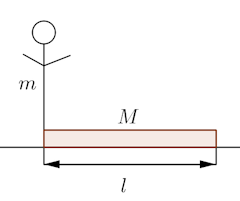
問題 滑らかな水平な床の上に質量M、長さlの板が置いてあり、その一端に質量mの人が乗っている。その人が板の他端まで歩くと、その間に板はどれだけ動くか。
【解答例】
人の進む方向を速度の正の向きにとることにする。
人の速度をu、板の速度をVとすると、運動量保存則より、
![]()
したがって、
![]()
板に対する人の相対速度vは
![]()
したがって、人が板の他端に到達するまでの時間tは
![]()
よって、板の移動距離は
![]()
(解答例終)
【解答例2】
人の進む方向を速度の正の向きにとることにする。
人の速さをu、板の速さをVとすると、運動量保存則より
![]()
したがって、
![]()
板に対する人の相対的な速さvは
![]()
したがって、人が板の他端に到達するまでの時間tは
![]()
よって、板の移動距離は
![]()
(解答例2)
物理系のヒトは相対速度を使って解くのだろうけれど、非物理系のヒトには何となく気持ち悪くて釈然としないように感じられると思うのでーー少なくともネムネコはそうだ。これじゃ〜解けた気にならない!!ーー、相対速度を用いない解答を・・・。
【解答例3】
時刻t=0の人の位置x₁を原点にとり、時刻t=0における板の他端の座標x₂をlとする。
また、時刻tにおける人の歩く速度をu、板の速度をVとすると、運動量保存の法則より
![]()
したがって、
![]()
時刻tにおける人の位置x₁と板の位置x₂は

となる。
人が歩いて板の他端に到達するとき、x₁=x₂となるので、このときの時刻は

よって、この間に板の他端の動いた量は
![]()
(解答例3終)
などなど。
歩く速度や板の動く速度はわからないのに、板が動いた距離はわかるという摩訶不思議な話!!
質点系の力学 第2回 質点系の運動量と角運動量 [ねこ騙し物理]
質点系の力学 第2回 質点系の運動量と角運動量
§1 質点系の重心の運動
質量m₁、m₂、m₃、・・・からなる質点系について考える。質点m₁、m₂、m₃、・・・の位置ベクトルをそれぞれr₁、r₂、r₃、・・・とし、i番目の質点がj番目の質点に及ぼす(内)力を![]() 、さらにi番目の質点に
、さらにi番目の質点に![]() の外力が働いているとする。
の外力が働いているとする。
このとき、各質点の運動方程式は次のようになる。

ここで、記号
![]()
である。
(1)式の両辺をすべて足し合わせると、
![]()
より、
![]()
が得られる。
質点系の全質量をMとすると、
![]()
と、重心を
![]()
によって定義すると、(2)式は
![]()
となる。
これは、位置ベクトルがR、質量がMの1個の質点が![]() という力を受けている運動方程式になっている。つまり、質点系の重心は系全体の質量と外力の全てが集中した1個の質点のように運動する。
という力を受けている運動方程式になっている。つまり、質点系の重心は系全体の質量と外力の全てが集中した1個の質点のように運動する。
§2 運動量とその保存則
各質点の運動量を![]() で表すことにし、(3)をtで微分したもの
で表すことにし、(3)をtで微分したもの
![]()
は全体の運動量であり、これは重心に全質量が集中した質点がもつ運動量に等しい。この式を時間で微分すると、
![]()
となり、これと(4)式から
![]()
となるので、質点系全体の運動量の時間変化の割合は外力の総和に等しいことになる。
外力が存在しないか、外力が存在してもその総和が0であるとき、(5)の右辺は0になるから、

となり、質点系の運動量の総和は一定に保たれる。
すなわち、
![]()
これが運動量保存則である。
§3 角運動量とその保存
![]()
であるから、(1)の各式とr₁、r₂、・・・のベクトル積(外積)をとるとことによって、各質点の角運動量![]() の時間変化に関する次式を得ることができる。
の時間変化に関する次式を得ることができる。

これを辺々加え、内力![]() が
が![]() に平行であるとすると、
に平行であるとすると、
![]()
となるので、内力の項は全て消えてしまい、結果、
![]()
したがって、質点系び全角運動量の時間変化は、その系に働く外力のモーメントの総和に等しい。
もし、外力が働いていなかったり、働いていてもモーメントの総和が0であるとき、角運動量の総和は時間によらず一定で、保存される。
自分の重さで紐を切れないようにするには紐の断面形状をどのようにしたらいいか [ねこ騙し物理]
自分の重さで紐が切れないようにするにはどうしたら紐の断面形状をどのようにしたらいいか?
ネムネコは材料屋(材料力学や構造力学などを含む)じゃないけれど、学生の頃(大昔の話です)、どこかでこういう話を読んだ記憶があったので、すっかり風化した怪しい記憶を頼りに、
ーー嘘です、文学的修辞という奴です。何も覚えていないし、参考になるものを何も持っていないので、自力でーー
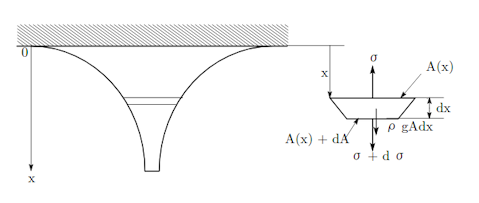
![]()
という力の釣り合い式をひねり出す。
2次の微小項を無視すると、この釣り合いの式は
![]()
と近似でき、Δx≠0で両辺を割ると、
![]()
Δx→0の極限をとると、
![]()
という微分方程式が得られる。
この式よりは、左辺第1項と第2項をまとめて、
![]()
や
![]()
とした方が、微分方程式の物理的な意味を直観的に理解しやすいに違いない。
ここで、σは応力、Aは紐の断面積、ρは紐の密度、xは紐を吊り下げているところからの距離で、gは重力加速度。ちなみに、(引っ張り)応力とは、(引っ張る)力を断面積で割ったもの。
応力σが一定の場合、

x=0のとき、A=A₀とすれば、
![]()
と、解いたものの、「断面積は本当に指数関数に変化するのだろうか」と、自分の答えに疑いの目を向ける。
ーーここまで全て頭の中でやる。エコのために紙と鉛筆なんて使ってない。ネムネコは地球に優しいのだ!!ーー
材料力学や構造力学などのレベルの高い教科書ならば、たぶん、この問題は例題として出ているのだろうけれど、ネムネコは材料力学などの本は持っていないので、 この解が正しいかどうか、
応力一定、自重、断面積を検索ワードに選び、ググってみたにゃ。
検索結果はこちら↓
ここ↑の材料力学の試験の3つ目の問題に答えが出ていた。
3 図のような断面積Aが場所によって変化する棒がある。図の微小部分について、棒の自重を考慮した力のつりあいの式を求めよ。また、自重によって棒に生じる応力σが場所によらず一定であるためには、断面積をどのように変化させればよいか(断面積Aをxの関数であらわせ)。ただし、x=0における断面積をA(0)=A₀とし、2次の微小項(dσdA)は無視してよい。この棒の密度をρ、重力加速度をgとせよ。
この問題の詳しい解答は上記のアドレスで見て欲しい。
いや〜、驚いたことに答えが合っていた(^^ゞ
全くの素人ながら、ネムネコは材料力学で優を取れるに違いない(笑)。
オレもまだまだ捨てたものじゃないケロね。

画像元:YouTubeの上の動画
ところで、
この試験問題を出した先生はとっても優しい先生だね。
ネムネコが出題者ならば、
2次の微小項(dσdA)は無視してよい。
という一文は死んでも問題に載せない。
まして、力のつりあいを求めるための、この図↓なんかは絶対に載せない。
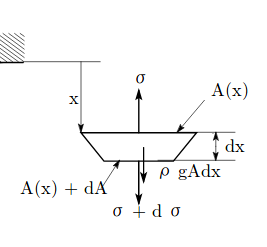
こうした図は自分で考え出さないといけないから。
こういうことができなければ、いつまで経っても、物理や工学などの微分方程式を自力で立てることなんてできねぇよ。




