ワンポイントゼミ 行列の固有値と固有ベクトル [線形代数の基礎]
ワンポイントゼミ 行列の固有値と固有ベクトル
Aを(2次の)正方行列とする。
![]()
を満たすkを行列Aの固有値、![]() をkに対する固有ベクトルという。
をkに対する固有ベクトルという。
![]() は
は![]() と変形できるから、
と変形できるから、![]() が存在するための必要十分な条件は
が存在するための必要十分な条件は
![]()
である(註1)。
とすると、
![]()
だから、
![]()
これを行列Aの固有方程式という(註2)。
(註1)
行列式|A−kE|≠0のとき、A−kEは逆行列を持つ。
![]()
となり、![]() に反する。
に反する。
(註2)
ケイリー・ハミルトンの公式
![]()
と、(2)は同じ形をしている事に注意。
問 次の行列の固有値と、固有値に対する固有ベクトルを求めよ。
![]()
【解】
![]() とし、kをAの固有値、kに対する固有ベクトルを
とし、kをAの固有値、kに対する固有ベクトルを![]() とする。
とする。
(1)
(x,y)が(0,0)以外の解を持つためには、
![]()
①は
![]()
k=1のとき、
②、③式より0x=0、y=0。
したがって、固有ベクトルは![]()
k=2のとき、
②、③式より、−x=0、0y=0。
したがって、固有ベクトルは![]()
(2)
(x,y)が(0,0)以外の解を持つためには、

k=2のとき、
k=7のとき
したがって、固有ベクトルは

(3)
①が(x,y)=(0,0)以外の解を持つためには
k=1のとき、①は
![]()
したがって、固有ベクトルは
![]()
(解答終)
定理
(2次の)正方行列Aの固有値が相異なる実数のとき、それに対する固有ベクトルは1次独立である。
【証明】
Aの相異なる2実根をλ₁、λ₂とし、λ₁、λ₂に対する固有ベクトルをそれぞれ![]() とすると、
とすると、
![]()
そこで、![]() の一次結合を
の一次結合を
![]()
とすると、
![]()
![]() を消去するために、①×λ₂−②を計算すると、
を消去するために、①×λ₂−②を計算すると、
![]()
![]() だから、
だから、
![]()
a=0だから、①は
![]()
![]() だからb=0。
だからb=0。
したがって、![]() と
と![]() は1次独立である。
は1次独立である。
(証明終)
上の定理より、問の(1)、(2)で求めた固有ベクトルは互いに1次独立であることがわかる。
h=1、l=1とすると、(1)の固有ベクトル![]() はが1次独立であることは明らか。
はが1次独立であることは明らか。
また(2)の固有ベクトル![]() の1次結合を作り、それを
の1次結合を作り、それを![]() と置くと、
と置くと、
![]()
になる。
![]() とおくと、|A|=1・1−2・(−1)=3≠0だから、Aは逆行列を持ち、
とおくと、|A|=1・1−2・(−1)=3≠0だから、Aは逆行列を持ち、
![]()
となり、 1次独立である。
今すごく大切なことをさり気なく書いていたけれど、列ベクトル![]() が1次独立か否かの判定は、
が1次独立か否かの判定は、![]() から作った行列
から作った行列
![]()
の行列式
![]()
の値から、|A|≠0ならば1次独立、|A|=0ならば1次従属と判定できる!!
ワンポイントゼミ 複素数の行列表現 [線形代数の基礎]
ワンポイントゼミ 複素数の行列表現
a、bを実数の定数、iは虚数単位とする。
また、R²からR²の写像fを
![]()
によって定める。
![]()
だから、
![]()
という対応関係が得られる。
これを行列を用いて書き換えると、
![]()
となる。
したがって、この写像は1次変換であり、また、写像fを表す行列は
![]()
である。
そこで、
![]()
のように対応させると、これが1対1の対応であることは明らかであろう。
![]() とおくと、A=aE+bJだから、a+bi→aE+bJに対応する。同様に、c+di→c+dJに対応し、
とおくと、A=aE+bJだから、a+bi→aE+bJに対応する。同様に、c+di→c+dJに対応し、
![]()
となるので、複素数の和が行列の和に対応していることがわかる。
![]()
となり、複素数の積が行列の積に対応していることがわかる。
z=a+biの逆元は
![]()
そして、行列![]() の逆元(逆行列)は
の逆元(逆行列)は
![]()
なので、複素数の逆元が行列の逆元に対応している。
つまり、加減乗除の四則について、複素数と複素数を表現した行列とは同一の代数的構造を有しているといる。
(註)

このことからも、Jが虚数単位iに対応していることがわかる。
Cを複素数(の集合)とする。
z=a+bi∈Cとすると、
![]()
というCからCへの関数を定義することができる。
だとしたら、これを手がかりに、
![]() とし、
とし、![]() とするとき、
とするとき、
![]()
というXからXへの関数を定義できるのではないだろうか。
a≧0かつb=0ならば、

と定義すれば、

となり矛盾しない体系を作れると思うが、行列一般に成立しない計算規則を作ってもな〜。
厳密なことを言うと、⑨は複素数から複素数の集合への写像で多価関数とよばれるもの。
たとえば、
![]()
で、これは本来
![]()
と書くべきところのもの。
だ・か・ら、
うるさいことを言うと、次のような計算は、
![]()
と、複素数の要素と複素数の集合の演算となって複素数の計算規則に抵触している。
やめたほうがいいんじゃないでしょうか。
コーヒーブレイク 直線ax+by+c=0と点(x₀,y₀)の距離 [線形代数の基礎]
コーヒーブレイク 直線ax+by+c=0と点(x₀,y₀)の距離
最近、抽象的で難しい話ばかりしていたかもしれないので、少しばかり、コーヒーブレイクを入れて、一休みしよう。
問題
直線ax+by+c=0(a≠0またはb≠0)と点(x₀,y₀)の距離dは
![]()
であることを示せ。
「どこがコーヒーブレイクだ」と怒られそうですが、まあ、そう怒らないで。
この式(1)は、高校の数学に出てくる公式(のようなもの)だから、見覚えがあるだろうし、実際、数学の試験などで使ったことがあるのではないか。
何はともあれ、問題を解いてみようじゃありませんか。
【解】
点P(x₀,y₀)から直線ax+by+c=0におろした垂線の足をHとする。
直線ax+by+c=0とベクトル![]() は垂直だから、
は垂直だから、![]() は
は![]() は平行。
は平行。
したがって、
H(x,y)は
![]()
と表すことができる。
①をax+by+c=0に代入すると、

よって、

(解答終)

このように、ベクトルをうまく活用すれば、Hの座標を求めることなく、直線と点との距離の公式(1)
を求めることができる。
では、ここで宿題
宿題
直線ax+by+c=0に関してP(x,y)と対称な点Q(x',y')を求めよ。
わからないって!!
①と②を使えば、Hの座標を求めることができるでしょっ。
そして、HはPとQの中点だから、

あるいは、

って、これでは答を教えたようなものじゃないか!!
どうやら、書きすぎてしまったようだ(^^ゞ
そして、これは、原点を通る直線に関する対称移動2の別解にもなっている。
この宿題ができたヒトは、宿題で求めたPからQへの写像が一般に1次変換にならないこと、そして、c=0のときに線形写像、つまり、1次変換になることを示し、この1次変換を表す行列を求めてみるといい。
特に、a²+b²=1のとき、つまり、![]() が単位ベクトルであるとき、どうなるか調べよ。
が単位ベクトルであるとき、どうなるか調べよ。
この記事に何が書かれているかわからないヒトは、次の問を解いてみるとよい。
そうすると、問題の解答で何が書かれているのかがわかってもらえるのではないか。
問 直線y=2x+1がある。このとき、次の問に答えよ。
(1) 直線y=2x+1に垂直な直線の傾きを求めよ。
(2) 点(2,1)を通過する直線y=2x+1に垂直な直線lの方程式を求めよ。
(3) 直線y=2x+1と直線lの交点を求めよ。
(4) 点(2,1)と直線y=2x+1と直線lの交点の距離を求めよ。
【解】
(1) y=2x+1に垂直な直線の傾きをmとすると、

(2)

(2)の別解
直線lの方程式を
![]()
とする。
点(2,1)はこの直線上にあるので、

よって、直線lの方程式は
![]()
(3) y=2x+1と![]() より、
より、

よって、
![]()
よって、交点は
![]()
(4) (2,1)と(2/5,9/5)の2点間の距離は
![]()
(解答終)
直線y=2x+1は直線2x−y+1=0と同じ。
したがって、(1)式より、直線2x−y−1=0と(2,1)の距離は
![]()
⑨未満の一つ覚えのように、公式(1)を使って、直線y=2x+1と点(2,1)の距離を求めるよりも、一度、この問の解答のように手順を踏んで直線の距離を求めた方が具体的なイメージをつかむことができ、実り多いものになるのではないかと思う。
[線形代数ってなにさ?_5] [線形代数の基礎]
[線形代数ってなにさ?_5]
5.線形写像の標準分解
準備段階が済んだので、ここから具体的な話を始められます。内容はかなりブルバキの影響を受けてます。写像の標準分解がそれです。線形写像の標準分解を使うと、線形代数の構成への見通しが格段に良くなるが、持論です。ここが線形代数前半の山です!。
線形写像fを行列っぽく見せるためにAで表します。Axはf(x)の事です。また以後の話はn次元ベクトル空間VからVへの線形写像A:V→Vに限定します。このようなAは線形変換と呼ばれます。手始めに核空間です。
[定義-12]
Ax=0を満たすx∈Vの全体をAの核と言い、ker(A)で表す。ker(A)は部分空間になる。
Ax=0かつAy=0とします。
A(x+y)=Ax+Ay=0+0=0だからx+y∈ker(A)。
A(λx)=λAx=λ・0=0だからλx∈ker(A)。
従ってker(A)は部分空間。
そして像空間。
[定義-13]
任意のx∈Vに対するAx∈Vの全体をAの像と言い、Image(A)で表す。Image(A)は部分空間になる。
Ax∈Image(A)かつAy∈Image(A)とします。
Ax+Ay=A(x+y)=でx+y∈Vは自明だから、Ax+Ay∈Image(A)。
λAx=A(λx)でλx∈Vは自明だから、λAx∈Image(A)。
従ってImage(A)は部分空間。
写像の一般論として、1対1写像の事をここでは単射,上への写像の事を全射といいます。全単射(1対1かつ上への写像)なら逆写像(逆関数)がある事、およびその逆は当然とします。
[定理-2]
Aが単射である条件は、ker(A)={0}。
[証明]
Aが単射である条件は、Ax=Ayならx=yを示す事。
Ax=AyならA(x-y)=0。従ってx-y∈ker(A)。よってker(A)={0}ならx-y=0でAは単射。
逆にAが単射なら、A0=0は自明なのでker(A)={0}。
[証明終]
[定義-14]
ker(A)={0}となるAは、正則と呼ぶ。従って、Aが正則⇔Aが単射。
[定理-3]
Aが単射なら、独立なベクトル集合を独立なベクトル集合へ移す。
[証明]
{v1,v2,・・・,vn}を独立とする。Aの線形性から、
![]()
とすると、{Av1,Av2,・・・,Avn}が従属ならどれかのλjが0でなくてよいが、Aは単射なので、
![]()
がどれかのλjが0でなくても成り立つ事になり、{v1,v2,・・・,vn}が独立でなくなる。これは不可。
従って{Av1,Av2,・・・,Avn}が独立になる事が必要。
[証明終]
[定理-4]
Aが単射なら全射。
[証明]
{v1,v2,・・・,vn}をVの基底とする。
[定理-3]から{Av1,Av2,・・・,Avn}は独立であるが、A:V→Vなので{Av1,Av2,・・・,Avn}はVから作れる最大本数の独立なベクトル集合となりVの基底である。
Aが全射である条件は、任意のy∈Vに対してAx=yとなるx∈Vがある事。
{Av1,Av2,・・・,Avn}はVの基底なので、任意のy∈Vについて、
![]()
となる基底表現が存在する。Aの線形性から、
![]()
は自明なので、Ax=yとなる、
![]()
x∈Vが存在することになりAは全射。
[証明終]
[定理-5]
Aが全単射なら、A-1A=AA-1=EとなるA-1がある。ここにEは恒等写像。
逆に上記を満たすA-1があれば、Aは全単射。
[証明]
当然。
[証明終]
ここまでの結果をまとめます。
[系-1]
以下は線形変換A:V→Vにおいて同値。
Aが正則 ⇔ ker(A)={0} ⇔ Aは単射 ⇔ Aは独立なベクトルを独立に移す ⇔ Aは全射 ⇔ A-1あり。
[証明]
[定義-14]と[定理-2~5]による。
[証明終]
次の定理が線形変換の標準分解になりますが、必要な用語を写像の一般論からもう一個持ってきます。
写像f:X→Yの定義域XをD⊂Xに制限した写像g:D→Yを、fのDへの制限(縮小)と呼び、g=f|Dで表します。D上では明らかにf(x)=f|D(x)。
[定理-6]
Aの核ker(A)には直和補空間R(A)が存在する。A|R(A):R(A)→Image(A)は正則で全単射。
従って(A|R(A))-1が存在する。
Aが正則である条件は明らかにker(A)={0}で、このとき(A|R(A))-1=A-1かつImage(A)=V(図-1)。
[証明]
R(A)の存在は、前回の[定理-1]による。
A|R(A)が正則は、ker(A)とR(A)とA|R(A)の定義から、ker(A|R(A))=R(A)∩ker(A)={0}だから。
A|R(A)が全単射は、Image(A)に対して[定理-4]と同じ状況。(A|R(A))-1の存在は[系-1]。
最後に繰り返しになるが、ker(A)={0}ならR(A)=VだからVでAは正則。このとき(A|R(A))-1の定義より(A|R(A))-1=A-1は自明。Image(A)=Vなのは[系-1]による。
[証明終]

図-1 線形変換の標準分解
自分の意見では、図-1が線形写像の全てです。この図は、定義域の中で核空間を除外すれば任意の線形写像は、全単射で逆行列を持つと言ってます。核空間は{0}に写像するだけですから、実質的に使いたいのはそうでない部分ですよね?。そこが常に全単射で逆行列を持つという、素晴らしい性質です。
次の定理は勝手に次元定理と呼んでますが、[系-1][定理-6]と同等です。
[定理-7]
![]()
[証明]
Vの次元は明らかにdim(ker(A))+dim(R(A))。A|R(A):R(A)→Image(A)は全単射だから、[系-1]よりR(A)の基底をImage(A)の基底に移すので、dim(R(A))=dim(Image(A))。よって、
![]()
[証明終]
これでベクトル空間の固有空間による直和分解に進む事ができます。
[線形代数ってなにさ?_4] [線形代数の基礎]
[線形代数ってなにさ?_4]
4.部分空間は直和のためにある
今後、線形写像と行列は区別なく用います。どっちの事を言ってるのかは、文脈で判断して下さい。
最後の準備段階です。準備段階なので「後で役に立つからやるんだ」と定理と定義を受け入れて下さい(心苦しいですが)。
[定義-6]
ベクトル空間V(それは集合でもありました)の部分集合W⊂Vで、Wがベクトル空間になるものをベクトル空間Vの部分空間と言う。
部分空間Wの特徴づけは簡単です。要するにベクトル空間の[定義-1]を満たせばいいんですよ。念のため再記すると、
[定義-1]
ベクトル空間(線形空間)Vとは、集合Vと体Kのペアがあり、次の公理を満たすもの。
(V1) a,b∈Vなら、a+b∈V。
(V2) a,b,c∈Vとして、(a+b)+c=a+(b+c)。
(V3) 0∈Vがあり、任意のa∈Vについて0+a=a+0=a。
(V4) 任意のa∈Vについて、-a∈Vがあり(-a)+a=a+(-a)=0。
(V5) a+b=b+a。
(V6) 任意のα∈Kとa∈Vについて、αa∈V。
(V7) α,β∈K、a∈Vとして、(αβ)a=α(βa)。
(V8) α,β∈K、a∈Vとして、(α+β)a=αa+βa。
(V9) α∈K、a,b∈Vとして、α(a+b)=αa+αb。
(V10) 1をKの単位元として、1a=a。
ですが、W⊂Vですからね。Wのメンバーはみんなベクトルです。そうすると(V2)~(V5),(V7)~(V10)は自明じゃないですか。残るのは(V1)と(V6)のみです。こればっかりは、やってみなけりゃわかりません。よって、
aとb∈W,α∈Kとして、a+b∈Wかつαa∈Wならば、Wは部分空間である。
証明終わり!(^^)。
次は完全なる用語の定義です。
[定義-7]
0∈VのみからなるVの部分集合{0}は部分空間である。これを{0}空間と呼ぶ。
エッ、証明しろ?。0+0=0∈{0},α0=0∈{0}だから・・・。
こっから本題です。Vの基底B={v1,v2,・・・,vn}を考えます。BはVの任意のベクトルを表現できる能力があります。例えばVの二つの部分空間W1とW2があった場合、w1∈W1とw2∈W2について、
![]()
(![]() 1)
1)
という基底表現があります。ここで添え字k1,k2,・・・,kpとL1,L2,・・・,Lqは、W1とW2を表すのに必要なBのメンバーの一部を取り出したという意味です。W1とW2はVの部分集合でもある訳ですから、普通に考えたら{v1,v2,・・・,vn}の全部を使う訳ないですよね?。それから(1)で表されるw1やw2をいくら足しても、またスカラー倍しても(1)の形になるので、部分空間の[定義-6]と矛盾しないのもわかりますよね?。
ここにもう部分空間の意図が見えています。基底とは抽象化された座標軸でした。要するに部分空間とは、部分座標軸による表現です。3次元空間で(x,y,z)座標じゃなく、xy平面で考えたい場合もあるよねぇ~、という話に対応するものです。
添え字k1,k2,・・・,kpに対応する基底を集めたベクトル集合をB1,L1,L2,・・・,Lqに関するものをB2とします。B1とB2はBの部分集合(部分基底)で、もちろん基底の定義から独立なベクトル集合です。
部分空間Wが部分基底Cで(1)のように表現される時、WはCで張られると言います(本当はもう少し広い意味で使われますが)。
W1を張るB1と、W2を張るB2の共通メンバー(B1∩B2)は、あるかないかのどちらかです(B1∩B2≠φかB1∩B2=φのどちらか)。
B1∩B2≠φの場合、共通メンバーだけ取り出してまた(1)の形を作ってやれば、それらはW1とW2の両方に含まれるのは明らかなので、W1∩W2≠φです。
B1∩B2=φの場合、W1∩W2=φになるのかと思いきや、W1∩W2≠φです。それは0ベクトルが任意の部分空間Wに含まれるからです。定義からα=0かつa∈Wとして、αa=0・a=0∈Wだからです。これは(1)で全ての係数を0としたケースです。しかしW1∩W2={0}にはなります。
証明します。v∈W1∩W2は0になる事を示します。(1)の左辺のw1とw2をvとした式を想像します。等しいので等置し移項すれば、B1∩B2=φなので独立・従属のところでしつこくやった線形和の形です。そしてB1∪B2⊂Bです。基底の定義より(1)の係数は全て0。従ってv=0。W1∩W2={0}。
[定義-8]
W1,W2⊂Vを部分空間として、W1∩W2={0}となるものを互いに独立な部分空間と呼ぶ。
証明はしませんが、W1の任意のベクトルとW2の任意のベクトルが独立なのは明らかですよね?。3次元空間でz方向の任意のベクトルとxy平面の任意のベクトルが独立なのは明らかですよね?。z軸とxy平面が、R3の部分空間である事も。W1とW2の共通分に自明でない(0でない)ベクトルがあるって事は、張る基底の一部がダブッテルって事です(^^)。
一般には互いに素な部分空間と言うようですが、自分は[定義-8]の呼び方がぴったりきます。
[定義-9]
W1とW2を部分空間、w1∈W1,w2∈W2として、w1+w2全体の集合Wを、部分空間W1とW2の和空間と呼び、W=W1+W2で表す。和空間は部分空間である。
あくまで基底ベースで考えましょう。W1を張る基底とW2を張る基底の全部を使って、Wを張ったと言ってるだけです。ところで部分空間のスカラー倍はなんでないんでしょう?。部分空間の任意ベクトルのスカラー倍は、定義から元の部分空間に戻っちゃうからです(^^;)。
[定義-10]
WがW1とW2の和空間であり、W1とW2が互いに独立なとき、WはW1とW2の直和であるといい、
![]()
で表す。これを「Wは、W1とW2へ直和分解された」とも言う。
WがW1とW2の直和でない場合、W1とW2のベクトルには重複するものも沢山ある訳ですから、W=W1やW=W2やW=W1=W2もありえます。
[定義-11]
ベクトル空間をVとして、
![]()
であるとき、W1はW2の(W2はW1)の直和補空間であると言う。
ただの補空間なる用語もありますが、わかりますよね?。基底概念は座標軸の一般化でした。部分空間はそれを束ねたものです。なので「ベクトル空間の部分空間による直和分解」は、基底概念の一般化と思えませんか(^^)。ベクトル空間を適当な部分空間で直和分解し、線形写像(行列)の作用を自明にする事、それが固有空間への直和分解であり線形代数前半の最終目標です。部分空間は、直和を定義するためにあります。
以下の定理に特殊ケースを作りたくないので、次の約束を行います。0ベクトルは任意の部分空間Wに含まれるのでW∩{0}={0}です。またW=W+{0}も明らかです。[定義-8]に従い、これも直和だとみなします。すなわち直和分解、
![]()
はいつでも成り立つとします。
[定理-1]
ベクトル空間Vの任意の部分空間Wには、{0}空間も含めれば直和補空間Uが必ず存在する。
[証明]
Vの基底をBとし、Wを張る部分基底をB1⊂Bとする。BにおけるB1の補集合B2=CBB1(ブルバキ式の記法です(^^;))でUを張れば良い。B2=φならU={0}。
[証明終]
[定理-1]はVがベクトル空間であればどこでもOKの定理です。VがVの部分空間Wであっても。部分空間Wの中の部分空間が可能なのはもう明らかだと思います。その部分空間はVでの部分空間と同じです。部分空間Wの中でS⊂Wの直和補空間を考えたい時は、WでのSの直和補空間Uという言い方をします。
[線形代数ってなにさ?_3] [線形代数の基礎]
[線形代数ってなにさ?_3]
3.線形写像の行列表現
基底の準備が整うと、線形写像の具体的な計算が可能になります(具体的といってもけっこう抽象的ですが(^^;))。やっつけちゃいましょう!(^^)。
と、その前に、線形写像とは何だったか?を思い出します。[線形代数ってなにさ?_1]で述べたように、線形写像は1次元の一次関数f(x)=axの高次元への一般化でした。ところがここでもまた障害になるのが、[線形代数ってなにさ?_1]の冒頭のベクトル空間の[定義-1]で、座標表現をあきらめてしまった事です。いきなり位置ベクトルに作用する行列を持ち出せないんですよ。そこでまた行列を、「一から手造りする」破目へと陥ります(^^;)。でも根っこは常に、位置ベクトルイメージであり行列イメージですからね。
普通の1次元の一次関数f(x)=axは、次の関数方程式の解です。
![]()
(1)を実際に解いた経験のある方なら知ってるはずですが、その途中で、
![]()
を導けます。(1)と(2)を合わせて、
Rを実数全体の集合,f:R→Rとして、次の条件を満たすものを一次関数と言う。
(L1) f(x+y)=f(x)+f(y)
(L2) f(λx)=λf(x)
を定義にしとくと、f(x)=axにいたる過程は多少楽になります。ところでAを行列、x,yを位置ベクトルとすると明らかに、
(L1) A(x+y)=Ax+Ay
(L2) A(λx)=λAx
が成り立ちます。それでこれは行けるぜ!という話になりました。さぁこっからはスカラーはギリシャ文字、ベクトルはアルファベットです。
[定義-5]
VnとVmをn次元とm次元のベクトル空間,f:Vn→Vmとして、次の条件を満たすものを線形写像と言う。x,y∈Vnとして、
(L1) f(x+y)=f(x)+f(y)
(L2) f(λx)=λf(x)
fがf:Vn→Vmなのは、xがベクトルでAxもベクトルだからです。f(x)やf(y)は当然、f(x),f(y)∈Vmという事になります。
x∈VnをVnの基底{v1,v2,・・・,vn}で、基底表現します。
![]()
これに[定義-5]の線形写像を作用させます。
![]()
(L1)を使います。
![]()
(L2)を使います。
![]()
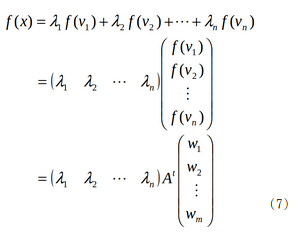
ここでλ1,λ2,・・・,λnはxの基底表現(3)の係数なので、xを具体的に決めれば全て既知です。よって(4)は次のように言ってます。
・線形写像は、定義域の基底ベクトルに関する値さえ決めてしまえば、完全に決まる。
値域のベクトル空間Vmにも基底{w1,w2,・・・,wm}があります。f(v1), f(v2),・・・,f(vn)∈Vmです。従って、

と表せます。ここで式の文字数が多くて面倒臭いという理由で、卑怯にもまだ使えないはずの行列記法を流用するんですよ。上記をこう略記するのだぁ~!、とか言いながら(^^;)。
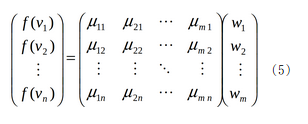
(5)の(μji)はまだ未定です。未定ですがこれらは、線形写像fの具体的な挙動から決めるべきものです。逆に言えば、行列(μji)で線形写像fが完全に決まる事になります。この行列(μji)の事を、線形写像fの表現行列と言います。
ちなみに(5)の形を超行列とか超ベクトルとか呼ぶ人がいますけれど、自分の意見では全く無意味な用語ですからね。確かにベクトルが位置ベクトル形式に並んでるので、何らかの用語を当てたくなる気持ちはわかりますが、「面倒臭いから行列記法を流用しただけ」です。でもそのおかげですっきりし、行列表現が得られます。
ところで行列(μji)の行番号と列番号の並びが、通常とは逆なのにお気づきでしょうか(転置状態)。これはわざとです。理由はすぐわかります。At=(μji)とします。Atはn×m行列です。
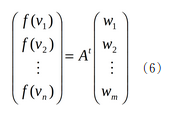
(4)も行列記法で略記し、(6)を代入します。
f(x)は、f(x)∈Vmです。f(x)にも{w1,w2,・・・,wm}による基底表現があります。
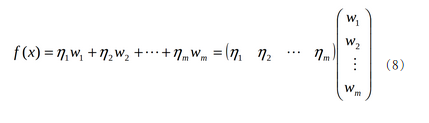
転置を取って、
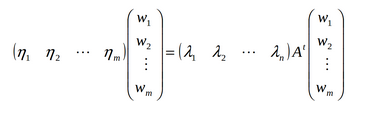
移項すれば、
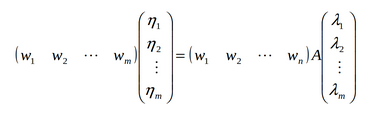
が得られます。b=(ηi),a=(λj)とします。{w1,w2,・・・,wm}は基底で独立でした。よって(9)が成り立つためには、b-Aa=0すなわち、
が必要となります。Aはm×n行列です。a=(λj)はベクトルxの基底表現の係数でした。基底とは座標軸でした。従ってaは座標軸{v1,v2,・・・,vn}に関する座標とみなせます。b=(ηi)も座標軸{w1,w2,・・・,wm}に関する座標とみなせます。よって、
![]()
とは、線形写像fによる座標変換式です(一次変換)。こうしてやっと座標表現は復活します(^^)。
ここまでの過程は、ある重要な含みを持っています。どんなに妙チクリンに見えようとベクトルに基底表現ある限り、どんなベクトルも最終的には位置ベクトルの計算に具体的に持ち込める、という重要な事実です。位置ベクトルだったら計算できます。たとえ関数空間であろうとも(^^)。
ベクトルxの{v1,v2,・・・,vn}に関する基底表現の係数を、位置ベクトル形式(λj)にまとめたものを、ベクトルxの基底{v1,v2,・・・,vn}に関する表現ベクトルと呼びます。
位置ベクトルの事は今後、数ベクトルと呼びます。数ベクトル空間の最も明解な基底、
は自然基底です。
線形写像fと表現行列Aは同じなのがわかりました。ところで行列に必要な基本演算は、和,スカラー倍,積です。fは関数(写像)なので和とスカラー倍は、関数の和とスカラー倍に対応します。
![]()
上記は、写像の和とスカラー倍の定義にまで遡って(6)~(10)の手続きで導けますが、まっ当然ですよね?。積についてはBAxは、xにAを作用させてからBを作用させるなので、写像の合成に対応します。
![]()
行列の基本演算を証明(?)したので、もう行列の使用は解禁しようと思います(^^)。
(執筆ddt³さん)
ワンポイントゼミ 直交行列と1次変換 [線形代数の基礎]
ワンポイントゼミ 直交行列と1次変換
問題 行列![]() による1次変換を考える。
による1次変換を考える。![]() は任意の列ベクトルとし、列ベクトル
は任意の列ベクトルとし、列ベクトル![]() とする。いま
とする。いま![]() と
と![]() の絶対値が等しくなる行列Aの集合をMとする。
の絶対値が等しくなる行列Aの集合をMとする。
このとき、次の問に答えよ。
(1) A∈Mとなるための必要十分な条件をa、b、c、dを用いて表わせ。
(2) A∈M、![]() ならば
ならば![]() と
と![]() の内積
の内積![]() と
と![]() と
と![]() の内積
の内積![]() が等しいことを示せ。
が等しいことを示せ。
(3) A∈Mのとき、逆行列を求めよ。
【解】
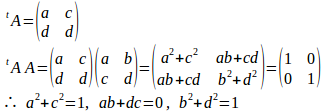
(1) ![]() とすると、
とすると、
![]() より、任意のx₁、x₂に対して
より、任意のx₁、x₂に対して
![]()
が成立しないといけないので、
![]()
でなければならない。
逆に、![]() ならば
ならば![]() 。
。
(2) ![]() とすると、
とすると、

(3)
![]()
したがって、
![]()
(解答終)
![]()
この条件は、1次変換を表す行列![]() の列ベクトル
の列ベクトル![]() が単位ベクトルで、互いに直交していることを示している。このような行列を直交行列といい、直交行列で表される1次変換は、線分の長さや角の大きさを変えない合同変換で、これを直交変換という。
が単位ベクトルで、互いに直交していることを示している。このような行列を直交行列といい、直交行列で表される1次変換は、線分の長さや角の大きさを変えない合同変換で、これを直交変換という。
![]() 、さらに、
、さらに、![]() とすると、
とすると、![]() と
と![]() の内積
の内積![]() は
は
![]()
と表すことができる。
したがって、
![]()
としたとき、![]() と
と![]() の内積は
の内積は
![]()
となる。
したがって、
![]()
となる、
![]() だとすると、
だとすると、
![]()
ここで、Eは単位行列である。
任意のベクトル![]() について(3)が成り立つためには、
について(3)が成り立つためには、
![]()
でなければならない。
逆に、(4)が成立するとき、
(1)より、
![]()
となる。
以上のことから、
![]()
であることがわかる。
![]() とすると、
とすると、
つまり、Aが直交行列であることと![]() は同値であることが分かる。
は同値であることが分かる。
また、このことから、
![]()
であること、![]() であることから、
であることから、

である。
これらは、2次の正方行列に限らず、n次の正方行列に関しても成り立つ性質である。
特に、Aが2次の正方行列であるとき、Aは
![]()
のいずれの形で表すことができる。
![]() は原点を中心にθ回転させる1次変換を表す行列であり、
は原点を中心にθ回転させる1次変換を表す行列であり、![]() は原点を通る直線
は原点を通る直線![]() に関しての折り返しを表す行列である。
に関しての折り返しを表す行列である。
ワンポイントゼミ 原点を通る直線の対称移動2 [線形代数の基礎]
ワンポイントゼミ 原点を通る直線の対称移動2
問題 R²のベクトル![]() の内積を
の内積を![]() とする。
とする。![]() を長さ1のベクトルとし、直線
を長さ1のベクトルとし、直線![]() による折り返し写像を
による折り返し写像を![]() とする。
とする。
(1) 次の関係が成立することを示せ。
![]()
(2) Tが線形写像(1次変換)であることを示せ。
【解】
(1) 原点を通る直線Lに関して点![]() と対称な点を
と対称な点を![]() とする。
とする。
問題の条件より、
1 ![]() と
と![]() の中点
の中点![]() は直線L上にある
は直線L上にある
2 ![]() と
と![]() は平行(※)だから、
は平行(※)だから、
![]()
![]() は直線L上にあるので、
は直線L上にあるので、

また、
![]()
①より、
![]()
したがって、

(2)

したがって、fは線形写像(1次変換)である。
(解答終)
(※) 直線L(の方程式)は![]() だから、直線Lと
だから、直線Lと![]() は直交し、
は直交し、![]() と直線Lは直交するので、
と直線Lは直交するので、![]() と
と![]() は平行である。
は平行である。
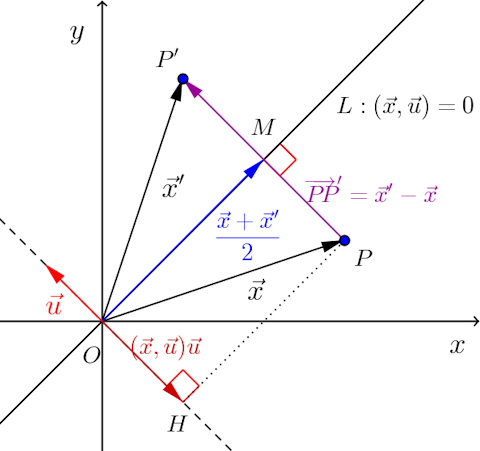
幾何的には、原点を通る![]() に平行な直線に点Pからおろした垂線をHとすると、
に平行な直線に点Pからおろした垂線をHとすると、
![]()
となる。
図を見るとわかるとおり、点Pと点P'の中点をMとすると、

したがって、
![]()
このことをベクトルの演算で求めたのが問題の(1)である。
この図の場合、![]() と
と![]() は逆向きのベクトルになっているけれど、
は逆向きのベクトルになっているけれど、![]() の値によって、つまり、
の値によって、つまり、![]() と
と![]() のなす角度によって同じ方向になったり、逆方向になったりする事に注意!!
のなす角度によって同じ方向になったり、逆方向になったりする事に注意!!
図形的な解法だと、こうした位置関係が問題になるので、注意が必要。
大学入試で、このような問題が出題されたら、限りなく全滅に近いかもしれない(笑い)。
だって、高校生の多く――理系の大学生の多くですら――はベクトルが苦手で、内積はうまく使えないもん。
【公式至上主義者向けの力技による(1)の別解】
![]() とすると、直線Lの方程式の方程式は
とすると、直線Lの方程式の方程式は
![]()
cosφ≠0のとき、
![]()
ここで、m=tanφとおくと、y=mxに関する折り返しを表す行列は
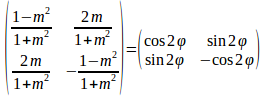
だから、
ここで、
とおくと、
![]()
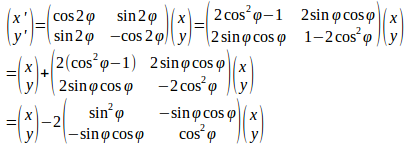
一方、
だから、
![]()
したがって、
![]()
また、cosφ=0のときは、![]() はx軸に平行な単位ベクトルとなり、直線はy軸。
はx軸に平行な単位ベクトルとなり、直線はy軸。
このとき、
![]()
となる。
よって、
![]()
(別解終)
このように、公式に基づき、力技だけでこの問題を解くこともできる(^^)
どうせ、お前ら、こんな解答が好きなんだろう?
(※) ![]() のとき、
のとき、![]() を計算すると、これが成立することを確かめるように!!
を計算すると、これが成立することを確かめるように!!

ワンポイとゼミ 1次変換とベクトル [線形代数の基礎]
ワンポイとゼミ 1次変換とベクトル
1次変換fによってベクトル![]() がベクトル
がベクトル![]() に写されるとき、
に写されるとき、![]() をfによる
をfによる![]() の像といい、
の像といい、
![]()
で表す。
また、1次変換fを表す行列がAであるとき、
![]()
で表す。
![]() をベクトル、kを実数とするとき、
をベクトル、kを実数とするとき、
![]()
が成り立つ。
【補足】
fを集合Xから空でない集合Yへの写像とする。
x₁、x₂∈X、kを実数とするとき、
![]()
が成り立つときfをXからYへの線形写像という。
f(x)=axとすると、
![]()
したがって、線形写像、1次変換はf(x)=axの拡張になっていることが分かる。
問1 1次変換fによってベクトル![]() がそれぞれ
がそれぞれ![]() に写されるとき、fを表す行列を求めよ。】
に写されるとき、fを表す行列を求めよ。】
![]()
問2 ベクトル![]() をそれぞれ
をそれぞれ![]() を写す1次変換fがある。fによる次のベクトルの像を求めよ。
を写す1次変換fがある。fによる次のベクトルの像を求めよ。
![]()
【解】
1次変換fを表す行列をAとすると、

これを1本の式であらわすと、

したがって、
![]()
(解答終)
問3 1次変換fによって、異なる4点P、Q、R、SがそれぞれP’、Q’、R’、S’に写されるとする。このとき、次のことを示せ。
(1) 線分PQをm:nに内分する点Tは、fによって、線分P’Q’をm:nに内分する点T’に写される。
(2) ![]()
【略解】
点P、Q、R、Sの位置ベクトルを、それぞれ、![]() とすると、点P’、Q’、R’、S’の位置ベクトル
とすると、点P’、Q’、R’、S’の位置ベクトル![]() は
は
![]()
(1) 線分PQをm:nに内分する点Tの位置ベクトルは![]() であるから、fによる像は
であるから、fによる像は

したがって、線分PQをm:nに内分する点Tは、fによって、線分P’Q’をm:nに内分する点T’に写される。
(2) PQとRSは平行だから、ある実数k≠0が存在して

である。
(略証終)
では、
互いに直交するベクトル![]() の、1次変換fによる像を
の、1次変換fによる像を![]() とするとき、
とするとき、![]() と
と![]() は直交するだろうか。
は直交するだろうか。
1次変換fを表す行列を![]() 、
、![]() とすると、
とすると、
つまり、一般に、1次変換によって直交性は保証されないことが分かる。
問4 平面上の点の写像によって、任意の点P、QがそれぞれP’、Q’に写されるとする。また、fによって原点Oは原点Oに写され、任意の実数m、n(m+n≠0)について、線分PQをm:nの比に分ける点は線分P’Q’をm:nの比に分ける点に写される。このとき、次のことが成り立つことを示せ。
![]()
【解】
![]() とすると、題意より
とすると、題意より
(1) 線分OPをk:1−kに内分する点の位置ベクトルは
![]()
したがって、
![]()
(2) 線分PQを1:1に内分する点の位置ベクトルは
![]()
したがって、P’Q’の中点の位置ベクトルは
![]()
(1)より
![]()
①と②より、

【解答終】
問題 次のうち、線形写像であるものはどれか。ただし、![]() とする。
とする。
![]()
【解】
(1) 線形写像ではない。
なぜならば、
(2) 線形写像である。
なぜならば、
![]()
(3) 線形写像ではない。
![]() とすると
とすると
①と②は一般に等しくないので、この写像は線形変換ではない。
(解答終)
問題の(3)は線形写像ではないけれど、
![]()
とすると、
が成立し、線形写像に近い性質を持っている。
ワンポイントゼミ 1次変換の合成と逆変換 [線形代数の基礎]
ワンポイントゼミ 1次変換の合成と逆変換
1次変換f、gを表す行列をA、Bとすると、合成写像![]() を表す行列はABである。
を表す行列はABである。
また、Aが逆行列をもつとき、fの逆変換f⁻¹を表す行列はA⁻¹である。
問1 1次変換
![]()
とする。
このとき、次の問に答えよ。
(1) 合成写像g○fとf○gを表す行列を求めよ。
(2) 点(2,3)はg○fとf○gによって、それぞれどんな点に写されるか。
【解】
(1)

(2)

したがって、
![]()
(解答終)
問2 1次変換![]() の逆変換f⁻¹を表す行列を求めよ。また、fによって点(2,3)に写される元の点を求めよ。
の逆変換f⁻¹を表す行列を求めよ。また、fによって点(2,3)に写される元の点を求めよ。
【解】
fを表す行列![]() は|A|=2・3−(−1)・5=11≠0だから逆行列A⁻¹をもつ。
は|A|=2・3−(−1)・5=11≠0だから逆行列A⁻¹をもつ。
![]()
fによって点(2,3)に写される点を(x,y)とすると、

(解答終)
問3 P(x,y)を直線y=xに関して対称移動し、さらに、原点Oのまわりに60°だけ回転すると点(2,1)に写る。点Pの座標を求めよ。
【解】
P(x,y)を直線y=xに関して対称移動させる変換をf、さらに、原点まわりに60°だけ回転させる1次変換をgとすると、
![]()
f、gを表す行列A、Bは
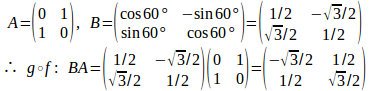
したがって、
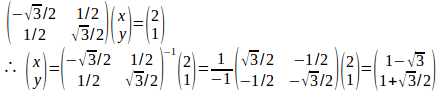
よって、元の点は(1−√3,1+√3/2)。
(解答終)
問題1
![]()
行列Aはどのような1次変換を表しているかを答えよ。
【解】
a²+b²≠0だから、
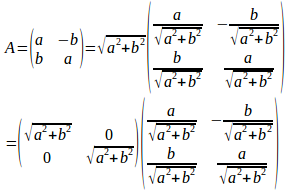
ここで、
![]()
とおくと、
したがって、Aは拡大(拡大比![]() )と原点を中心とする回転の合成写像を表している。
)と原点を中心とする回転の合成写像を表している。
(解答終)
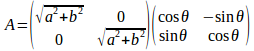
問題2 原点を通り、x軸の正の向きと角θをなす直線をlとする。点(x,y)のlに関する対称点(x’,y’)を次のような1次変換の合成に求める。
(a) 原点Oを中心とする角−θの回転によって(x,y)を(x₁,y₁)に写す。
(b) (x₁,y₁)をx軸に関する対称点(x₂,y₂)に写す。
(c) 最後に、原点Oを中心とする角θの回転によって(x₂,y₂)を(x’,y’)に写す。
各変換を行列を用いて、
![]()
と表し、それらを合成して
![]()
と表す。
行列A、B、C、Dを求めよ。
【解】
Aは原点Oを中心とする角−θの回転を表す行列なので
![]()
Bはx軸に関する対称変換であり、(x₂,y₂)=(x₁,−y₁)という対応関係があるので、
![]()
Cは原点Oを中心とする角θの回転を表す行列なので
![]()
したがって、

(解答終)
問題3 y=mxについての対称移動を表す行列を求めよ。
【解】
m=tanθ(0≦θ<π/2,π/2<θ<π)だから、
![]()
cosθの倍角公式を用いると
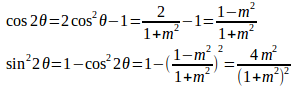
したがって、
m≧0(0≦θ<π/2)のとき
![]()
m<0(π/2<θ<π)のとき
![]()
よって、
![]()
以上のことから、
(解答終)
(※)
![]()
と求めることもできる。



