第39回 直交軸の変換 [ベクトル解析]
第39回 直交軸の変換
ここで、直交軸の変換として扱う対象は、原点を変えない、右手系の直交軸から右手系の直交軸への変換とする。
また、直交座標を表すのに、x、y、zのかわりに、x¹、x²、x³を用い、基本ベクトルの表記は、これまで使ってきたi、j、kではなく、e₁、e₂、e₃を用いる。ベクトルvの成分は![]() ではなく、v₁、v₂、v₃であらわすことにする。
ではなく、v₁、v₂、v₃であらわすことにする。
(注意)x、e、vの上下についている数字1、2、3を指標という。x¹、x²、x³は、xの1乗、2乗、3乗の意味ではないので、注意!!

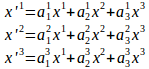
直交軸Ox¹、Ox²、Ox³を他の直交軸Ox’¹、Ox’²、Ox’³に変える場合を考える。


上と下の指標が逆になっているので注意が必要。
ということで、


なのだけれど、実は(1)から(2)を、(2)から(1)を直接導くことができる。やってみるにゃ。

![]()
![]()
![]()
![]()
![]()
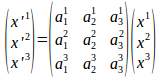
以降、(1)と(2)のように、いちいち、成分に分けて書くのは面倒なので、

さらに、直交軸が(1)のように変換されるとき、点の座標の変化を調べることにする。
点Pのx¹軸、x²軸、x³軸に対する座標をx¹、x²、x³、また、x’¹軸、x²軸、x’³軸に対する座標をx’¹、x’²、x’³とする。 ![]()
(3)式から
![]()
![]()
![]()
iやjという指標のローマ字には特に意味はないので、(4)のiとjを入れ替えて、
![]()
――このあたりは融通無碍というか、首尾一貫していないと言おうか――
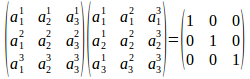
なのですが、⑨よりは行列を使った方がわかりやすいだろうから、行列を使って書くと、
となる。
これからだいたい推測がつくだろうけれど、 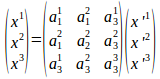
そして、
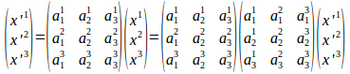
が成立するので、
になるのであった。
同様に、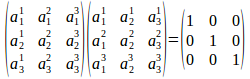
になるのであった。
2016-03-23 12:00
nice!(0)
コメント(0)
トラックバック(0)




コメント 0